V
主页
Panoptic-SLAM:使用全景分割的动态环境中的视觉 SLAM 代码已开源
发布人
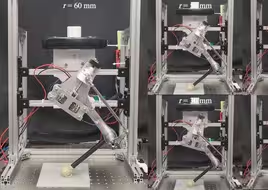
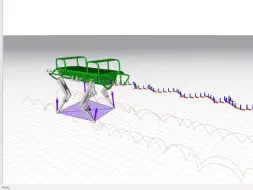
https://www.youtube.com/watch?v=BNCKWLrMk8I&t=3s Panoptic-SLAM: Visual SLAM in Dynamic Environments using Panoptic Segmentation Gabriel Fischer Abati, João Carlos Virgolino Soares, Vivian Suzano Medeiros, Marco Antonio Meggiolaro, Claudio Semini The majority of visual SLAM systems are not robust in dynamic scenarios. The ones that deal with dynamic objects in the scenes usually rely on deep-learning-based methods to detect and filter these objects. However, these methods cannot deal with unknown moving objects. This work presents Panoptic-SLAM, an open-source visual SLAM system robust to dynamic environments, even in the presence of unknown objects. It uses panoptic segmentation to filter dynamic objects from the scene during the state estimation process. Panoptic-SLAM is based on ORB-SLAM3, a state-of-the-art SLAM system for static environments. The implementation was tested using real-world datasets and compared with several state-of-the-art systems from the literature, including DynaSLAM, DS-SLAM, SaD-SLAM, PVO and FusingPanoptic. For example, Panoptic-SLAM is on average four times more accurate than PVO, the most recent panoptic-based approach for visual SLAM. Also, experiments were performed using a quadruped robot with an RGB-D camera to test the applicability of our method in real-world scenarios. The tests were validated by a ground-truth created with a motion capture system. https://arxiv.org/pdf/2405.02177 https://github.com/iit-DLSLab/Panoptic-SLAM
打开封面
下载高清视频
观看高清视频
视频下载器
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
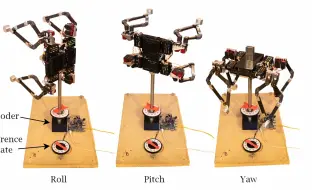
通过优化理论指导设计双足以达到控制和任务的最优
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
Mask2former:大一统分割框架爆火教程!语义分割、实例分割、全景分割一次性全搞定!论文解读+源码复现,迪哥手把手带你玩转图像分割!
双足机器人步态生成 MATLAB and Simulink
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
人形机器人足底机械结构设计
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
【OCS2】进阶Demo也都迁移到ROS2啦
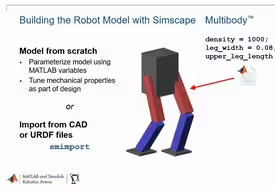
双足机器人的建模与仿真 MATLAB and Simulink
Tuning Legged Locomotion Controllers via Safe Bayesian Optimization
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
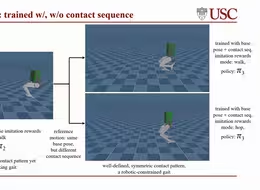
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
人形机器人灵巧手臂最新成果
再调几天就开源-纯mpc-matlab代码很适合大家入门
MuJoCo 仿真 案例欣赏
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
MPC and RL, two different roads to legged locomotion, and that's OK
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
四足机器人跌落姿态调整 基于强化学习的机器人控制
Consensus Complementarity Control for Multi-Contact MPC
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
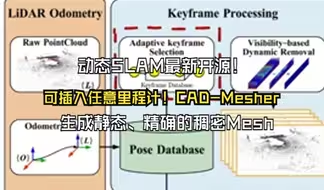
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
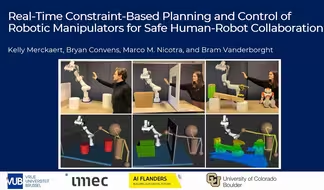
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
The legged robot whole-body State RVIZ plugin
【3D数学】认识欧拉角
移动机械臂运动学仿真 ROS+rviz (地盘是全向车,简化为4个普通轮)
视觉SLAM特征点法与直接法的区别是什么
(Talk ICRA 2024) Actor-Critic Model Predictive Control
Ghost Robotics 四足机器人 专注特定领域 【狗头】