V
主页
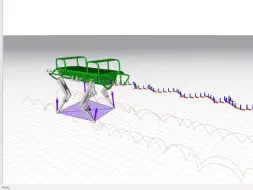
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
发布人
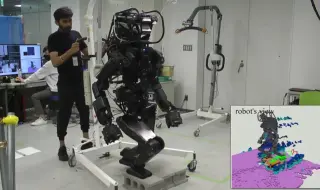
https://www.youtube.com/watch?v=JC9jA9nP4mw Centroidal Trajectory Generation and Stabilization Based on Preview Control for Humanoid Multi-Contact Motion Masaki Murooka; Mitsuharu Morisawa; Fumio Kanehiro Multi-contact motion is important for humanoid robots to work in various environments. We propose a centroidal online trajectory generation and stabilization control for humanoid dynamic multi-contact motion. The proposed method features the drastic reduction of the computational cost by using preview control instead of the conventional model predictive control that considers the constraints of all sample times. By combining preview control with centroidal state feedback for robustness to disturbances and wrench distribution for satisfying contact constraints, we show that the robot can stably perform a variety of multi-contact motions through simulation experiments. paper link: https://ieeexplore.ieee.org/abstract/document/9807369
打开封面
下载高清视频
观看高清视频
视频下载器
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
MPC and RL, two different roads to legged locomotion, and that's OK
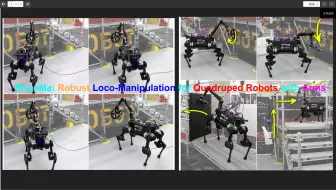
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
How to design nonlinear MPC with deep learning prediction model
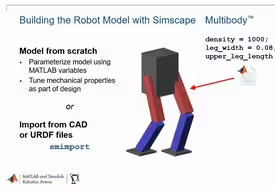
双足机器人的建模与仿真 MATLAB and Simulink
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
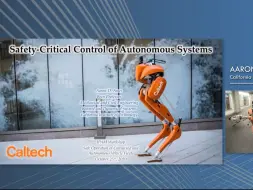
Safety-Critical Control of Autonomous Systems -Aaron Ames
The legged robot whole-body State RVIZ plugin
RA-L 2024 | CDM-MPC 结合质心动力学和模型预测控制的人形机器人连续跳跃
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
人形双足模仿学习强化学习AMP ASE Exbody求助
MuJoCo 仿真 案例欣赏
An Efficient and Versatile Framework for Multi-Contact Optimal Control
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
Meet the Futuristic Military Robot Dog
通过优化理论指导设计双足以达到控制和任务的最优
「爬行抓取」机械手成精 能从手臂上溜走 拿完还能自动合体
Deep Compliant Control for Legged Robots
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
Control is dead ?control+ learning才是未来
Learning whole-body manipulation for quadrupedal robot
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
DreamWaQ: legged robot walks in harsh environments with its imagination P1
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
双足机器人步态生成 MATLAB and Simulink
使用普通商用零件低成本DIY构建四足机器人然后基于强化学习控制
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
Implementing Torque Control-Based Biped Walking of Humanoid Robots
autonomous path planning over curved uneven path
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
DTC: Deep Tracking Control 1
Learning Humanoid Locomotion with Transformers
Humanoid robot research result highlights in 2022- CNRS-AIST JRL