V
主页
17_1KUKA机器人使用workvisual
发布人
库卡机器人实用编程教程
打开封面
下载高清视频
观看高清视频
视频下载器
15_1KUKA机器人标牌抓爪编程
第02讲 KUKA机器人变量
17_3KUKA机器人机器人零点设定课件
KUKA机器人高级编程(下)2-2 用KRL编写运动指令C
第28讲 KUKA机器人配置外部自动模式
15_2KUKA机器人以尖点工具为对象对抓爪进行编程
16_2KUKA机器人程序的逻辑编程#库卡机器人
10_11KUKA机器人主程序对子程序的调用
28 发那科机器人定位指令讲解
第17讲 KUKA机器人字符的使用
10 发那科机器人6个坐标系介绍
16_1KUKA机器人程序的逻辑编程#库卡机器人#机器人教程
KUKA机器人程序文件的使用
11_1KUKA机器人局部子程序和全局子程序的使用
01-2KUKA机器人的分类及功能-2
第14讲 KUKA机器人FOR循环
02-4KUKA机器人的编程方式-1
17_2KUKA机器人机器人零点设定课件
04-2KUKA机器人示教器操作界面的功能与使用-1
03-1KUKA机器人的使用安全-1
04-3KUKA机器人示教器操作界面的功能与使用-2
15发那科机器人用户坐标系的使用和三点法标定
第26讲 KUKA机器人中断编程
10_6KUKA机器人简单数据和数组的使用1
第04讲 KUKA机器人计算机预进
09_3KUKA机器人设定机器人BASE坐标偏移1
第10讲 KUKA机器人全局子程序
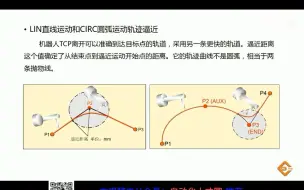
13_10KUKA机器人绝对运动和相对运动编程
KUKA机器人高级编程(下)3-2 triggerC
03-3KUKA机器人的使用安全
Kuka机器人
08_4KUKA机器人用固定工具手动运行机器人
KUKA机器人高级编程(上)5-8 对话框举例C
第03讲 KUKA机器人逻辑编程入门
KUKA机器人高级编程(上)2-4 枚举enumerationC
12_3KUKA机器人沿轨迹运动的姿态导引
01 发那科机器人公司及产品介绍
29 发那科机器人数字量io的使用
18 发那科机器人用户坐标系的使用 切换用户坐标系
KUKA机器人高级编程(下)2-1 将联机表单转化为KRLC