V
主页
🔥ANYmal Parkour跑酷:学会攀爬和跳跃|2023【苏黎世联邦理工学院&英伟达】
发布人
来自 leggedrobotics 和 NVIDIAEmbedded 的机器人研究人员让四足机器人学习攀爬和跳跃。 经过模拟训练后,机器人可以自主决定如何爬过或爬过障碍物,这将帮助人类用于完成危险的工作。 Hoeller, David, Nikita Rudin, Dhionis Sako, and Marco Hutter. "ANYmal Parkour: Learning Agile Navigation for Quadrupedal Robots." arXiv preprint arXiv:2306.14874 (2023). 论文:https://arxiv.org/abs/2306.14874 https://www.youtube.com/watch?v=eyvPjBvUFSE
打开封面
下载高清视频
观看高清视频
视频下载器
四足机器人学习爬梯子|2024【苏黎世联邦理工学院】
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
开源Mobile ALOHA:学习双手移动操作|2024【斯坦福大学】
六足攀爬机器人|2019【日本法政大学】
ANYexo 2.0:完全驱动的上肢外骨骼|TRO 2023【苏黎世联邦理工学院】
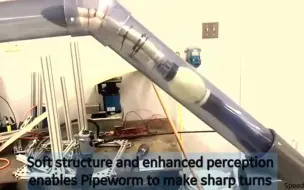
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
用于外骨骼的人机连接系统|2023【苏黎世联邦理工学院】
机器人使蜜蜂和鱼能够相互交谈|2019|EPFL洛桑联邦理工学院【Science Robotics】
软机器蛇实时仿真|2019【伍斯特理工学院】
多臂有效载荷操作-混合现实|2022【苏黎世联邦理工学院】
机器人跑酷学习|CoRL 2023【上海期智&斯坦福】
用于软机器人的可伸缩温度计|2022【Harvard】
Vision 60会游泳的两栖机械狗:背步枪上山下水?|2022【美国Ghost Robotics】
消除站立工作痛苦的辅助服|2020【日本アルケリス株式会社】
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
瓢虫启发的折纸机器人|2020|韩国首尔大学【Science Robotics】
被动动态双足行走:迈向乐高大小人形机器人|2022 ICRA【卡内基·梅隆大学】
启用虚拟移动「本田Avatar Robot」分身机器人|2021【日本本田技研工業株式会社】
农业采摘机器人|2023|Floating Robotics【苏黎世联邦理工学院】
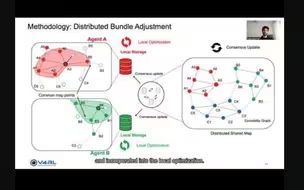
分散式协作SLAM|ICRA 2023【苏黎世联邦理工学院】
逼真面部表情机器人:人机面部表情协同|2024|Science Robotics【哥伦比亚大学】
管-虫机器人“Pipe-worm” Robot|2022【通用电气】
人形机器人Cassie:学习站立、行走、奔跑|2024【加州大学伯克利分校】
四足机器人负重全身运动操纵|2024【南加州大学】
自主咖啡服务机器人|2019【苏黎世联邦理工学院】
两轮跳跃机器人「Ascento」2020【苏黎世联邦理工学院】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
厕所清洁机器人|2023【Somatic】
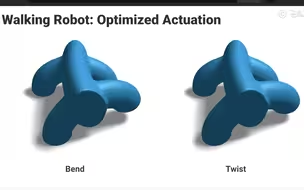
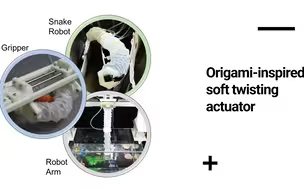
折纸结构启发的软扭转致动器|2022|SoRo【南方科技大学】
智能家居机器人Anna|2022【丹麦AnnaOne ApS】
田径假肢义足Rami|2017【東京大学】
自主除草机-多种作物激光除草|2021【美国Carbon Robotics】
自然智能:机器人监测栖息地|2022【苏黎世联邦理工】
开源项目SafePicking:通过对象级映射学习安全对象提取|2022 ICRA【帝国理工学院】
卡通人形机器人:Mirokaï|2023【法国Enchanted Tools】
全自动番茄剪枝机器人Kompano|2021【荷兰Priva】
波士顿动力机器狗Spot用于企业资产管理|全球半导体制造商Globalfoundries|2022【波士顿动力】
轻量膝关节外骨骼|2022【TRO】
做我能做的,而不是我说的:机器人基础语言|2022【谷歌•机器人】
ANYexo 2.0:穿着全驱动外骨骼机器人的日常生活|2022【苏黎世联邦理工】