V
主页
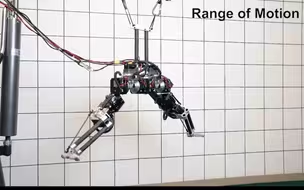
腿足机器人 极限跑酷
发布人
turkeybro.com 一个低成本的机器人可以进行极限跑酷,包括在两倍高的障碍物上跳高,在两倍长的间隙上跳远,在楼梯上倒立,以及在倾斜的坡道上奔跑。 作者:Cheng Xuxin*,Shi Kexin*、Ananye Agarwal、Deepak Pathak 摘要:人类可以通过以高度动态的方式穿越障碍物来进行跑酷,这需要精确的眼部肌肉协调和运动。让机器人完成同样的任务需要克服类似的挑战。传统上,这是通过将感知、驱动和控制系统独立设计到非常低的公差来完成的。这将他们限制在严格控制的设置中,例如实验室中的预定障碍路线。相比之下,人类能够通过练习学习跑酷,而不会显著改变其基本生物学。在本文中,我们采用了类似的方法,在一个低成本的小型机器人上开发机器人跑酷,该机器人具有不精确的驱动和一个用于感知低频、抖动和容易产生伪影的单前置深度相机。我们展示了直接从相机图像中操作的单个神经网络策略,在大规模RL的模拟中训练,如何克服不精确的传感和驱动,以端到端输出高度精确的控制行为。我们展示了我们的机器人可以在2倍高度的障碍物上进行跳高,在2倍长度的间隙中进行跳远,倒立和在倾斜的坡道上奔跑,并推广到具有不同物理特性的新型障碍物课程。
打开封面
下载高清视频
观看高清视频
视频下载器
机器狗遇到并嘲笑一只真正的狗
装扮成牛仔的机器人
四足机器人PongBot-Q有效负载测试
双足机器人上的电路板安装
舞蹈机器人,跳舞吧!
即使再忙,也别忘了生活该有的样子
对人类有用的机器人视频
轮腿式机器人“Diablo刑天”开箱视频
会飞檐走壁爬墙的机器人
轮式自平衡机器人炫技
开源双足机器人
人工智能伴侣桌面双足机器人
机器人及倒立摆群组
四足机器人在石化行业的应用测试
七个Spots机器人同步花样点舞
遥操作主从控制系统
居家在管kong区里面使用Diablo轮足机器人做跑腿
四足机器狗学习灵活的双足运动
具有高负荷运载能力的四足机器人
小米的 CyberDog 2
像蛇一样的月球探索机器人
工业机器人三轴机械臂模型
可以伸展变形的攀爬机器人
一种具有本体感知驱动的小型两足机器人的设计与控制
两轮机器人 控制平衡之舞
用于物品处理的腿式机械手的远程操作
腿部和反作用轮操纵手柄控制测试
极客创客移动机器人作品
当会功夫能打太极的机器人在博物馆找到工作时...
不走寻常路的越野机器人
同心轴3自由度机器人手腕
完全自主仓库飞行无人机系统
Army Robot机器人机械设计
人机比赛 机器人运动会
双足被动动态行走机器人
PAL 机器人 | TALOS MPC 与 WBID 一起行走
四足仿生机器人"机械牦牛 "这个是一个绝对的野兽
Hello Robot Stretch 3
原地后空翻 少林功夫?
ICub Robot