V
主页
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
发布人
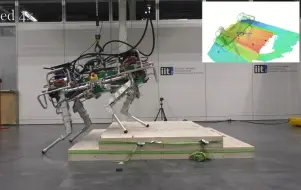
https://www.youtube.com/watch?v=CpDCKIyBb5Y Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation Abstract Despite remarkable progress in artificial intelligence, autonomous humanoid robots are still far from matching human-level manipulation and locomotion proficiency in real applications. Proficient robots would be ideal first responders to dangerous scenarios such as natural or man-made disasters. When handling these situations, robots must be capable of navigating highly unstructured terrain and dexterously interacting with objects designed for human workers. To create humanoid machines with human-level motor skills, in this work, we use whole-body teleoperation to leverage human control intelligence to command the locomotion of a bipedal robot. The challenge of this strategy lies in properly mapping human body motion to the machine while simultaneously informing the operator how closely the robot is reproducing the movement. Therefore, we propose a solution for this bilateral feedback policy to control a bipedal robot to take steps, jump, and walk in synchrony with a human operator. Such dynamic synchronization was achieved by (i) scaling the core components of human locomotion data to robot proportions in real time and (ii) applying feedback forces to the operator that are proportional to the relative velocity between human and robot. Human motion was sped up to match a faster robot, or drag was generated to synchronize the operator with a slower robot. Here, we focused on the frontal plane dynamics and stabilized the robot in the sagittal plane using an external gantry. These results represent a fundamental solution to seamlessly combine human innate motor control proficiency with the physical endurance and strength of humanoid robots. https://www.science.org/doi/10.1126/scirobotics.aav4282
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人步态生成 MATLAB and Simulink
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
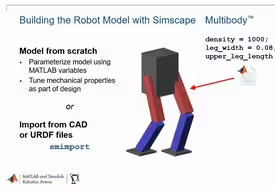
双足机器人的建模与仿真 MATLAB and Simulink
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
How to design nonlinear MPC with deep learning prediction model
Bipedal Locomotion Reward Learning from Demonstrations via Inverse Reinforcement
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
人形机器人足底机械结构设计
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
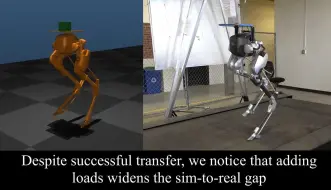
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
人形机器人 手指机械结构
The legged robot whole-body State RVIZ plugin
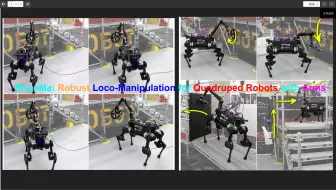
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
MuJoCo 仿真 案例欣赏
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
Agile Continuous Jumping in Discontinuous Terrains
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
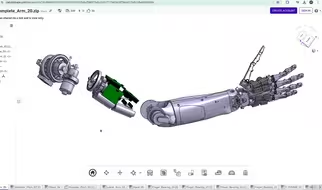
人形机器人灵巧手臂最新成果
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
Impact-Aware Bimanual Catching of Large-Momentum Objects
基于模型控制的人形机器人行走 MATLAB and Simulink
Curiosity-Driven Learning of Joint Locomotion and Manipulation Tasks
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
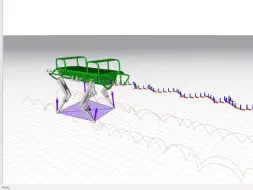
通过优化理论指导设计双足以达到控制和任务的最优
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped
基于分层优化的四足机器人全身运动控制搬运重物
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
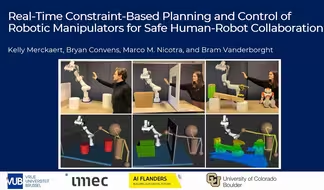
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
幽灵机器人 Ghost Robotics - Vision 60
(ICRA 2024) Actor-Critic Model Predictive Control
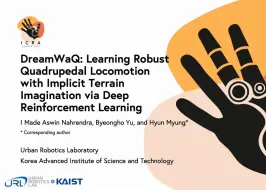
DreamWaQ: legged robot walks in harsh environments with its imagination P1