V
主页
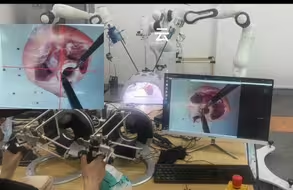
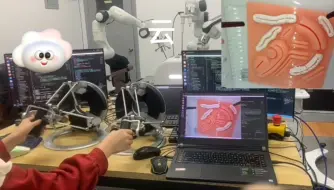
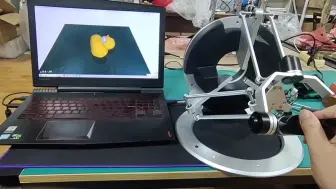
手术机器人从手传动机构研究
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
达芬奇手术机器人工具结构
7自由度力反馈主手,弹性体触觉仿真
力反馈主手—手术机器人应用(11)〈腔镜手术机器人平台—心脏瓣膜置换实验〉
手术机器人从手换个角度动一动
力反馈主手—手术机器人应用(4)〈腔镜手术机器人末端夹子工具精准控制〉
Touch力反馈主手—手术机器人应用
手术机器人末端夹爪 力觉感知解决方案,力觉感知精确至0.02N
力反馈主手—手术机器人应用(13)〈腔镜手术机器人平台—进入手术室动物实验〉
6自由度力反馈主手—采用带紧绳机构的两级绳传动机构
力反馈主手—手术机器人应用(7)〈腔镜手术机器人平台-夹取纸张〉
新产品,7自由度力反馈主手(2),第一台实验样机OK。新手柄设计,更适合手术机器人操控
力反馈主手—手术机器人应用(8)〈腔镜手术机器人平台—工具手眼映射〉
新产品,7自由度力反馈主手(1),第一台实验样机OK。新手柄设计,更适合手术机器人操控
力反馈主手—手术机器人应用(1)〈超低延时控制器动力性能优异的腔镜平台〉
力反馈主手—手术机器人应用(6)〈腔镜手术机器人平台〉
六自由度力反馈主手,弹性体Demo测试
力反馈主手—手术机器人应用(10)〈腔镜手术机器人平台—空中接力精细操作〉
Omega7力反馈主手遥操作宇树Unitree Z1机械臂
力反馈新产品,新结构,新手感,新体验
.omega7,omega6,omega3,全系列力反馈主手,虚拟现实交互设备测试中!未来科技感满满~
Omega7力反馈主手遥操作史陶比尔机器人 ,虚实结合,远程准确抓取。
力反馈主手—手术机器人应用(3)〈分体式标定〉
Sens Haption 6D Tao HF力反馈主手+UR5e协作机械臂+robotiq电动夹爪,遥操作应用——水平方向物体精准取放(2)
力反馈主手—手术机器人应用(12)〈腔镜手术机器人平台—进入手术室实验〉
Sens Haption 6D Tao HF力反馈主手+UR5e协作机械臂+robotiq电动夹爪,遥操作应用——物体精准取放(1)
7自由度力反馈主手,新产品,新进展……
入门级力反馈主手遥操作机械臂应用
多样化的力反馈设备
sigma7力反馈主手遥操作Franka机械臂实验平台,抓取
sigma7力反馈主手翻转90度测试,新的重力补偿,继续前行
Sigma.7力反馈主手可空间任意位置、姿态悬停
力反馈主手+视觉辅助,遥操作机械臂工业场景应用(8)[
力反馈主手,虚拟手术应用,Q弹
7自由度力反馈主右手设备遥操作同构左手设备
Sens Haption 6D Tao HF力反馈主手+UR5e协作机械臂+robotiq电动夹爪,遥操作应用—-不规则形状调整角度抓取(5)
力反馈主手—手术机器人应用(9)〈腔镜手术机器人平台—移物、套圈操作〉
lambda.7力反馈主手手术机器人应用,force dimension系列omega.7,sigma.7,lambda.7
Omega.7力反馈主手应用于内窥镜手术机器人实例
Desktop 6D 6自由度力反馈主手 ,所有6自由度都带力反馈,中国制造
类达芬奇-力反馈主手研发继续进行中……