V
主页
mpu6050手姿检测,二维云台同步控制
发布人
基于mpu6050的手姿检测,同步控制二维舵机平台。
打开封面
下载高清视频
观看高清视频
视频下载器
mpu6050平衡模型
广工英雄云台重力补偿机构原理以及效果展示
玩玩实验室里的二维云台+陀螺仪
补偿重力罢了,也没什么含金量
78元机器狗,居然有这么多功能
【开源】寒假在家无聊了怎么办?做个平衡车玩玩吧
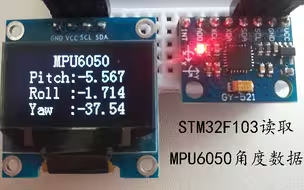
STM32读取MPU6050角度数据
【开源】使用摇杆控制OLED上的眼珠子
智能小车制作教程(基于stm32)
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
【工创赛】车再不调好学妹要去隔壁打RM了
给平衡车加了一种控制方式--基于LD3322的语音控制方式
直线一级PID倒立摆控制
[铁头山羊stm32入门教程] 6.4. MPU6050(上)
三级倒立摆控制 Triple Pendulum on a Cart
STM32F407手写体识别效果展示
dmp解算mpu6050控制舵机
仿生手测试
重力补偿demo
让大学生破防只需要一个平衡机器人
【白嫖】关节机器人电机PCB工程源文档及foc三环固件代码
2024年全国电子设计大赛 闭环步进电机二维电动云台,高精度控制简单。秒杀普通舵机云台。使用简单的串口字符串指令即可控制,发货前配置测试好发出 2023年 E题
这可能是全站第二丝滑的OLED菜单了吧?
学习心得|基于卡尔曼滤波的MPU6050姿态解算
[西安科技大学]用新学的FOC和Opencv做个电赛自动追踪控制系统,弥补下去年国二的遗憾
课设平衡车 和喝醉了似的
《点灯大师》
二级倒立摆
这就是玩硬件和玩软件的区别,试错成本略高
自锁定,大炮打蚊子
一个基于51单片机的简单小项目——篮球计时计分器
PID控制实验
自研FOC系列,从0开始手搓无人机
团结就是力量,硬件小组就要交付量产了。平衡球杆装置
自动装填➕自瞄
不是吧,学长,这个速度路径都能跑飞
「电赛E题」不是,哥们,这也能识别?| 109元主控 OpenCV方案 准备开源
终于调好了,稳得一批啊