V
主页
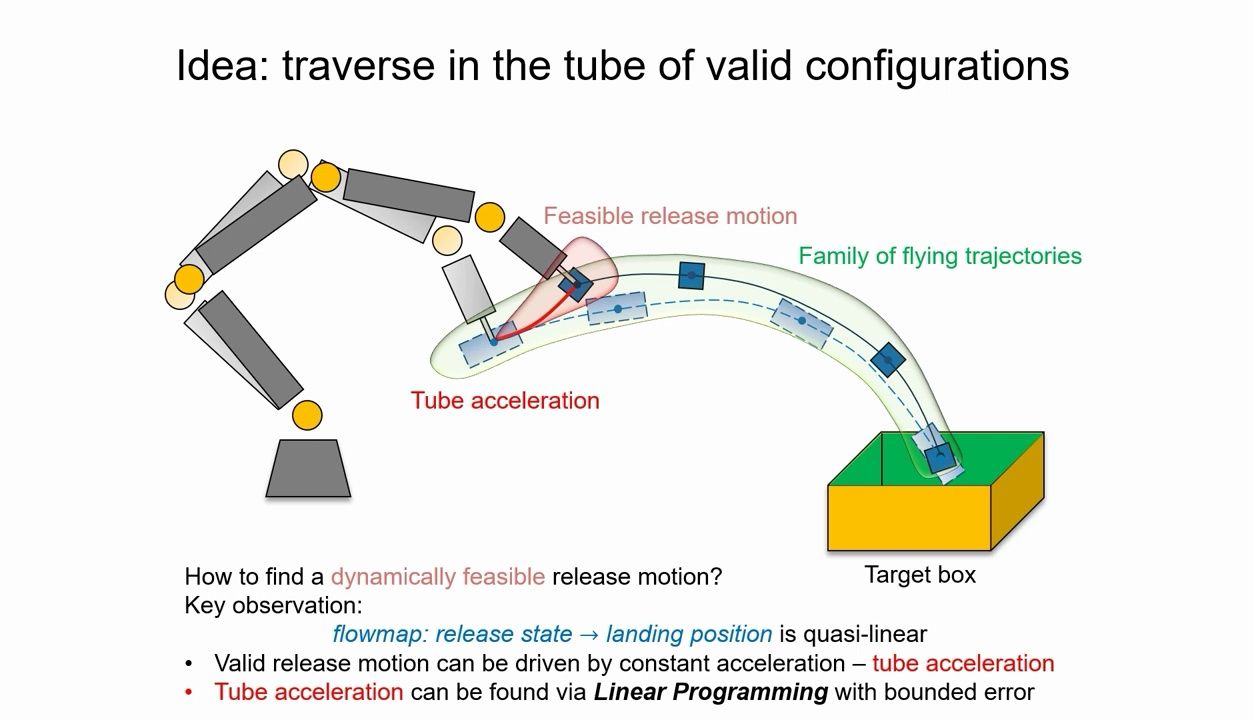
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
发布人
https://www.youtube.com/watch?v=S-lKzQdYu_U Tube acceleration: robust dexterous throwing against release uncertainty Abstract: In robotic throwing, the release phase involves complex dynamic interactions due to object deformation and limited gripper opening speed, often resulting in inaccurate and nonrepeatable throws. While data-driven methods can be employed to compensate for the release uncertainty, the generalizability of learned models to unseen objects is not guaranteed, and object-specific fine-tuning with new data may be required. This fine-tuning process raises concerns about the scalability of such methods for dexterous throwing, where the robot needs to execute diverse motions for throwing various objects. Instead of case-by-case fine-tuning, we aim at designing throwing motion robust against release uncertainty. We encapsulate all uncertainties resulting from complex contact dynamics in a surrogate model of their resulting effect on gripper opening delay . We introduce the notion of tube acceleration to model the class of constant-acceleration motion in joint space that guarantees a release within the set of valid throwing configurations. We propose a convex relaxation of the primal optimization problem with a tight error bound and evaluate its performance in terms of reliability and efficiency. Results show that the approach offers run-time performance to allow online computation of throws on a 7-DoF robot arm. It achieves a high accuracy and success rate (97% for planar throws) at throwing a variety of complex objects, even when using a simple ballistic model for the object's flying dynamics. paper link: https://ieeexplore.ieee.org/document/10494917
打开封面
下载高清视频
观看高清视频
视频下载器
MuJoCo 仿真 案例欣赏
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
对象说就叫:小 狗 军 团 🐕
How to design nonlinear MPC with deep learning prediction model
MPC and RL, two different roads to legged locomotion, and that's OK
强化学习教父Sutton持续反向传播算法登Nature!证明深度学习还不如浅层网络
Robust Robot Walker: Learning Agile Locomotion over Tiny Traps
上电驱?波士顿动力Atlas向液压说再见?不会再爱了!
【OCS2】进阶Demo也都迁移到ROS2啦
为什么Isaac gym 读取的速度不等于位置的微分呀,用pd算的力矩不就是错的吗
Curiosity-Driven Learning of Joint Locomotion and Manipulation Tasks
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
人形机器人足底机械结构设计
Semantic Traversability Estimation Using Pose Projected Feature
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
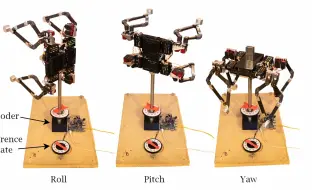
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
Control is dead ?control+ learning才是未来
一些基于NVIDIA Isaac Gym的开源机器人虚拟环境 无人机 水下ROV
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
通过优化理论指导设计双足以达到控制和任务的最优
RA-L 2024 | CDM-MPC 结合质心动力学和模型预测控制的人形机器人连续跳跃
DPO:人类偏好对齐技术——大模型训练的最后一公里
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
【学术讲座】LQR Learning Pipelines
四足机器人跌落姿态调整 基于强化学习的机器人控制
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
三指灵巧手,强化学习手内灵巧操作连续成功
一个神级代码复现网站,近百万研究生收藏!
通过残差强化学习实现近距离四轴飞行器的稳健控制 四旋翼
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
这美女机器人说一句最高性价比主播不过分吧
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
使用运动约束强化学习的四足机器人
祝大家中秋快乐,万事如意!!!
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
双足机器人步态生成 MATLAB and Simulink