V
主页
COT#3:COT稳定条件
发布人
COT控制的关键在输出ripple要够大,但一般来说,过大的ripple却是工程师不喜欢的,那么对于COT而言,多大的ripple才不足以造成控制稳定度变差呢?若需要降低ripple,该怎么做呢?
打开封面
下载高清视频
观看高清视频
视频下载器
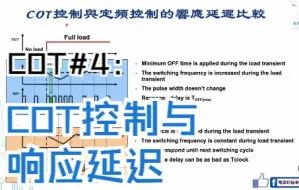
COT#4:COT控制与响应延迟
COT#1:什么是COT控制?
环路补偿器设计基础1——极点与零点基本概念,电源控制必须知道的基本概念
COT#2:适应性COT控制
手把手教你学数字电源系列#13——双环(电压外环+电流内环)控制模型分析与设计
COT#6:混合式数字COT
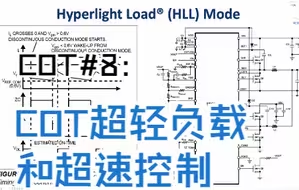
COT#8:COT超轻负载和超速控制
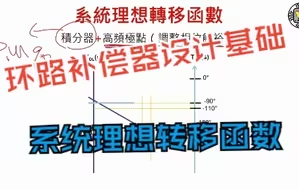
环路补偿器设计基础5——必须知道的一个概念:系统理想转移函数
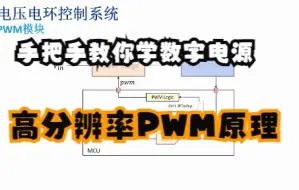
手把手教你学数字电源系列#16——高分辨率PWM原理
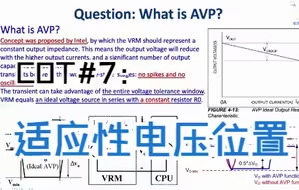
COT#7:适应性电压位置(AVP)技术
手把手教你学数字电源系列#11——平均电流控制模式原理及测试
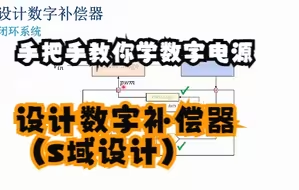
手把手教你学数字电源系列#17——设计数字补偿器(s域设计)
环路补偿器设计基础8——一阶系统补偿器设计
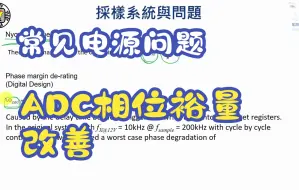
常见电源问题——ADC常见问题 #3:相位裕量改善
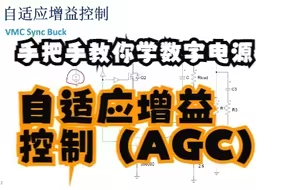
手把手教你学数字电源系列#7——自适应增益控制(AGC)
Bode100 Tips 6——2 MHz Sync Buck与波德图量测实例
常见电源问题——ADC常见问题 #2:周边线路问题
环路补偿器设计基础3——系统频宽真的是越大越好吗?
CAN与CAN FD协议阐述及最新发展培训教程
手把手教你学数字电源系列#10——峰值电流控制模式次谐波振荡
基于python #5——实操电源系统环路设计(Ⅱ型补偿器)
常见电源问题——ADC常见问题 #1:混叠效应
MPLAB® X IDE技巧
基于python #1——学习电源系统的模拟补偿器
手把手教你学数字电源系列#1——资源的介绍
USB Smart Hub工作原理及应用培训教程
MPLAB® X IDE开发介绍
环路补偿器设计基础2——为何会有系统频宽?相位裕量?增益裕量?
Microchip Polarfire® SoC 基于Ubuntu的Buildroot环境搭建和入门级使用培训教程
motorBench®开发套件2——使用motorBench
基于PolarFire® SoC FPGA的Microchip非对称多处理(AMP)解决方案
MPLAB®代码配置器嵌入式软件开发——系统简介
环路补偿器设计基础4——系统的相位裕量真的是越大越好吗?
Microchip两轮电动车触摸屏仪表盘解决方案
安全解决方案系列研讨会1——Microchip在RISC-V应用中实现MultiZone™安全性
MPLAB®代码配置器嵌入式软件开发——实验演示
FOC基础与实战培训教程
Microchip基于OCPP 1.6的MCU方案演示
基于PIC18F-Q10的OTA介绍培训教程
汽车外部LED显示解决方案