V
主页
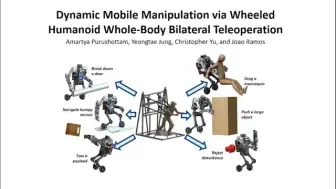
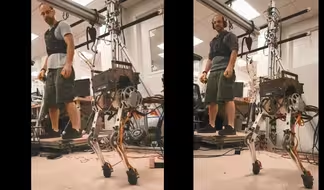
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
发布人
https://www.youtube.com/watch?v=QqcJsSH0YjY Dynamic Mobile Manipulation via Whole-Body Bilateral Teleoperation of a Wheeled Humanoid Abstract: Humanoid robots have the potential to help human workers by realizing physically demanding manipulation tasks such as moving large boxes within warehouses. We define such tasks as Dynamic Mobile Manipulation (DMM). This letter presents a framework for DMM via whole-body teleoperation, built upon three key contributions: Firstly, a teleoperation framework employing a Human Machine Interface (HMI) and a bi-wheeled humanoid, SATYRR, is proposed. Secondly, the study introduces a dynamic locomotion mapping, utilizing human-robot reduced order models, and a kinematic retargeting strategy for manipulation tasks. Additionally, the letter discusses the role of whole-body haptic feedback for wheeled humanoid control. Finally, the system's effectiveness and mappings for DMM are validated through locomanipulation experiments and heavy box pushing tasks. Here we show two forms of DMM: grasping a target moving at an average speed of 0.4 m/s, and pushing boxes weighing up to 105% of the robot's weight. By simultaneously adjusting their pitch and using their arms, the pilot adjusts the robot pose to apply larger contact forces and move a heavy box at a constant velocity of 0.2 m/s. paper link: https://ieeexplore.ieee.org/abstract/document/10323148
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
有开源github代码! RA-L论文 人形机器人的多接触全身控制
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
幽灵机器人 Ghost Robotics - Vision 60
双足机器人步态生成 MATLAB and Simulink
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
基于模型控制的人形机器人行走 MATLAB and Simulink
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
CasADi 3.6 tutorial (C++ Matlab Python)
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
Highly dynamic gaits controlled by a whole-body MPC
Semantic Traversability Estimation Using Pose Projected Feature
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
基于分层优化的四足机器人全身运动控制搬运重物
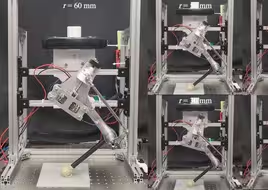
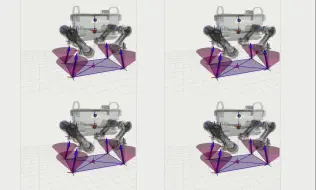
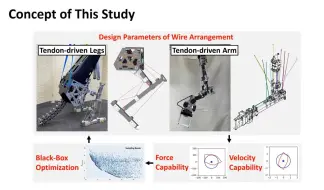
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
How to design nonlinear MPC with deep learning prediction model
清宝机器人受邀浦江创新论坛,和最前沿科技同台pk
上电驱?波士顿动力Atlas向液压说再见?不会再爱了!
【中英精校+笔记】洗衣铺床煮咖啡,以后家务都交给它了!我让人形机器人Neo住进了我家|1X|Humanoid|2024.09.08
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
Learning legged locomotion, RL as one tool in an engineered system
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
IHMC Atlas autonomous path planning across narrow terrain
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers