V
主页
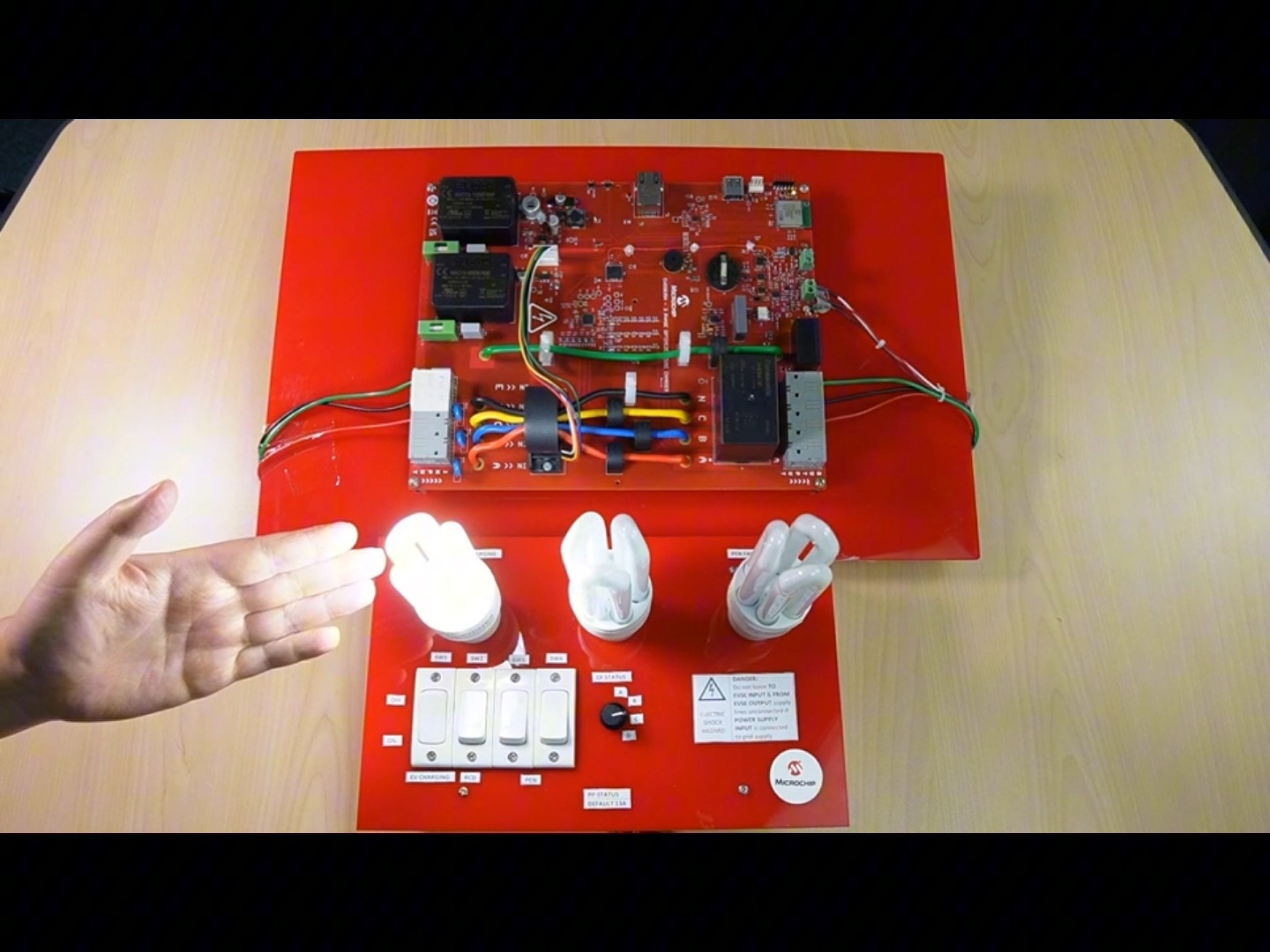
Microchip基于OCPP 1.6的MCU方案演示
发布人
近日,Microchip在 “驶向未来:深度体验Microchip电动出行应用方案” 巡展中演示了“基于OCPP 1.6的MCU方案” 。 Microchip“驶向未来:深度体验Microchip电动出行应用方案”巡展活动,向您展示电动交通工具(EV)的各种前沿技术。通过现场的演示和体验,您能够全方位地感受我们整体系统解决方案的创新之处,看到、触摸到和深入了解到电动出行的未来。 Microchip期待您的到来,亲自感受推动电动出行变革的创新之处! 立即报名:https://www.bilibili.com/opus/929407897538920450?spm_id_from=333.999.0.0
打开封面
下载高清视频
观看高清视频
视频下载器
基于ATSAMD51 LAN9253 EtherCAT®开发培训教程
手把手教你学数字电源系列#13——双环(电压外环+电流内环)控制模型分析与设计
基于PIC32MK的多电机控制培训教程
MPLAB®代码配置器嵌入式软件开发——实验演示
MPLAB® X IDE开发介绍
环路补偿器设计基础5——必须知道的一个概念:系统理想转移函数
环路补偿器设计基础6——二阶系统补偿器设计
汽车油泵解决方案
CAN与CAN FD协议阐述及最新发展培训教程
Microchip智能头盔参考设计
基于PolarFire® SoC FPGA的Microchip非对称多处理(AMP)解决方案
学个数字电源主控 dsPIC33C #9 - 捕捉比较PWM定时器模块 ②
COT#8:COT超轻负载和超速控制
基于python #5——实操电源系统环路设计(Ⅱ型补偿器)
手把手教你学数字电源系列#18——设计数字补偿器(s域到z域的映射)
COT#3:COT稳定条件
手把手教你学数字电源系列#17——设计数字补偿器(s域设计)
基于MPTT协议的MCU按键工程培训教程
环路补偿器设计基础7——三型补偿电路RC参数计算
环路补偿器设计基础1——极点与零点基本概念,电源控制必须知道的基本概念
motorBench®开发套件1——简介与设置
手把手教你学数字电源系列#7——自适应增益控制(AGC)
MPLAB®代码配置器嵌入式软件开发——系统简介
COT#2:适应性COT控制
Hybrid SMPS #1 混合式数字电源越来越盛行?那么什么是混合式数字电源呢?
motorBench®开发套件3——MCAF与代码生成
motorBench®开发套件2——使用motorBench
环路补偿器设计基础9——二型补偿电路RC参数计算
手把手教你学数字电源系列#21——数字环路软件流程
COT#6:混合式数字COT
学个数字电源主控 dsPIC33C #9 - 捕捉比较PWM定时器模块 ③
学个数字电源主控 dsPIC33C #8 —— 支持精细边沿定位的高分辨率PWM ④
AVR® DD系列MCU培训教程
兆易创新MCU的500W PFC+LLC数字电源解决方案,功能与优势的全面解读!
Bode100 Tips 3——波德图量测之判读GM、PM与Stability Margin
COT#5:当COT遇上轻载
学个数字电源主控dsPIC33C #1 —— 开场白
环路补偿器设计基础3——系统频宽真的是越大越好吗?
学个数字电源主控 dsPIC33C #9 - 捕捉比较PWM定时器模块 ①
手把手教你学数字电源系列#10——峰值电流控制模式次谐波振荡