V
主页
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
发布人
来自苏黎世联邦理工学院和迪士尼研究部的研究团队引入了一种新方法,将运动学生成模型与基于物理的角色控制相结合。该团队的方法首先训练了一个奖励代理来预测下游不可微分控制任务的性能,提供一个高效且可微分的损失函数。。。。。。 标题:Robot Motion Diffusion Model: Motion Generation for Robotic Characters 链接:https://la.disneyresearch.com/wp-content/uploads/RobotMDM_2.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
DeepMind训练AI踢足球,技术精湛堪比真人
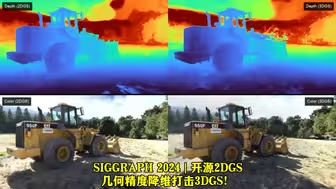
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
上海交大张伟楠强化学习课程第16讲:基于扩散模型的强化学习
Unity使用自己的强化学习算法(DQN)训练智能体——学习日记
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
【强化学习玩游戏】简单易懂的PPO算法及公式推导!强化学习轮足机器人控制器、月球登陆器训练+超级马里奥项目实战!
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
这或许是流体力学机器学习最好的视频!机器学习如何在流体力学中应用?Steve Brenton大佬精讲湍流模型,深度强化学习、CFD
移动机器人运动规划
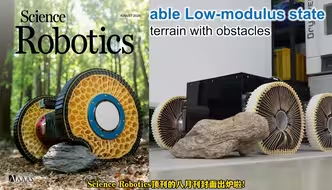
Science Robotics | 从液体表面张力获得灵感,研发出”能屈能伸”的可变刚度车轮
深度强化学习 PPO 纯白板逐行代码Python实现
RSS'24满分论文 | ATM框架 无需大量标注,让机器人 从视频学习变得简单高效
通过深度强化学习让AI学会走路,学步过程堪比真人!
ALOHA模仿学习ACT真机实践——笨蛋机械臂两天才学会瓶子
为什么Isaac gym 读取的速度不等于位置的微分呀,用pd算的力矩不就是错的吗
2_从零开始学习强化学习_MDP基础概念
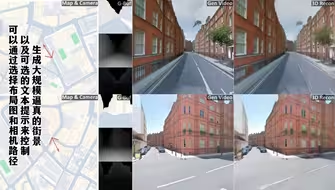
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
CVPR'24 满分Oral | EscherNet 实现任意视角灵活扩散生成 解锁3D视觉无限可能!
DiffTF:基于Transformer的大词汇量高质量 3D 物体生成框架,能够实现具有高度多样性、丰富语义和高质量的大词汇量3D物体生成。
秋招入职必刷!三小时快速上手【深度强化学习】,不愧是王树森博士,讲的实在是太通俗易懂了!
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
综述:自动驾驶的多智能体强化学习,旨在帮助研究人员整合多智能体强化学习技术
1_从零开始学习强化学习_强化学习介绍
pairwise motion piror与原版amp高速运动对比效果
[下]6个人形双足强化学习开源项目,论文讲解,代码速读,FLD,PBRS,footstep,ExBody,humanplus,humanoid-gym
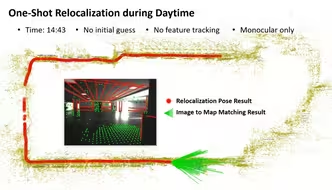
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
NeRF系列公开课01 | 基于NeRF的三维内容生成
上海交大张伟楠强化学习课程第1讲:强化学习简介I
DPO:人类偏好对齐技术——大模型训练的最后一公里
计算机视觉最不卷的方向:三维重建学习路线梳理
高翔SLAM报告:开阔高动态区域的激光融合定位
不同神经网络本质上有区别吗?迪哥一次性带你吃透CNN、RNN、GAN、GNN、Transformer五大深度学习神经网络!原理解读+项目实战,小白秒上手!
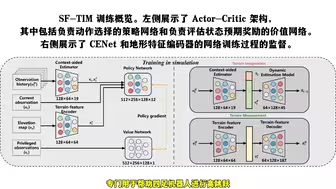
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
移动 ALOHA ,学习低成本全身远程操作的双手移动操作