V
主页
基于模型控制的人形机器人行走 MATLAB and Simulink
发布人
https://www.youtube.com/watch?v=jnJbXdp2wak&list=PLn8PRpmsu08rdL7jwgrQjewdFXxDHbyIV&index=4 Brian Kim and Sebastian Castro discuss the theoretical foundations of humanoid walking using the linear inverted pendulum model (LIPM) with MATLAB® and Simulink®. First, Brian and Sebastian introduce the basics of generating a stable walking pattern with the linear inverted pendulum model. Then, they create a trajectory plan for the individual footsteps of a bipedal robot and apply inverse kinematics to calculate the necessary actuator motion to realize this pattern. Finally, they test the walking pattern on a 3D rigid body model of the humanoid robot created in Simscape Multibody™. You can find the example models used in this video in the MATLAB Central File Exchange. For more information, you can access the following resources: - Blog and Videos: Walking Robot Modeling and Simulation (https://bit.ly/3JTs0ST ) - Blog and Videos: Walking Robot Control (https://bit.ly/3PVa7XG ) - Paper: The 3D Linear Inverted Pendulum Mode A simple modeling for a biped walking pattern generation (Kajita et al. 2001) https://www.cs.cmu.edu/~hgeyer/Teaching/R16-899B/Papers/KajiitaEA01IEEE_ICIRS.pdf © 2019 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The MathWorks, Inc.
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人步态生成 MATLAB and Simulink
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
人形机器人足底机械结构设计
人形机器人 手指机械结构
有开源github代码! RA-L论文 人形机器人的多接触全身控制
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
四足运动:用三种不同的方法在崎岖地形上行走
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
Tutorial - Crocoddyl - Nicolas Mansard
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
Semantic Traversability Estimation Using Pose Projected Feature
CasADi 3.6 tutorial (C++ Matlab Python)
人形机器人腿部结构 基于 4DoF 球面并联机构
Spot 自主乘坐电梯和开门
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
真牛!这个人形机器人吊打很多厂家的“产品”
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
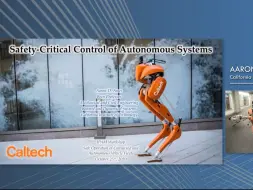
Safety-Critical Control of Autonomous Systems -Aaron Ames
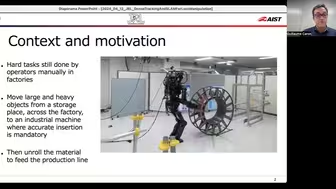
Humanoid robot research result highlights in 2022- CNRS-AIST JRL
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
MPC and RL, two different roads to legged locomotion, and that's OK
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
MuJoCo 仿真 案例欣赏
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
Learning legged locomotion, RL as one tool in an engineered system
模型预测控制简介
HD Atlas 操控 | 波士顿动力公司
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
老年照护的未来?——人居环境机器人“5号”(The Five,小五)
write a ROS2 publisher with Python P7
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
Learning whole-body manipulation for quadrupedal robot
印度的四足机器人 看着还可以哦
上海交大张伟楠强化学习课程第6讲:无模型控制方法I
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump