V
主页
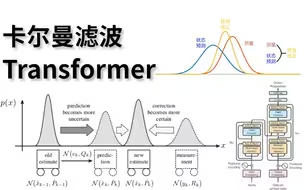
(补录)mpu6050三种常见的滤波方法对比 | 卡尔曼滤波、一阶互补滤波、DMP姿态解算
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
卡尔曼滤波实现目标跟踪,不到一小时轻松学会!
一个很变态...但可以让你快速掌握【卡尔曼滤波】及注意力机制的超强教程!绝对通俗易懂!
基于hal库stm32,mpu6050,利用四元数和简易的卡尔曼滤波进行姿态解算
【博图技巧】手把手教你传感器模拟量转换与滤波
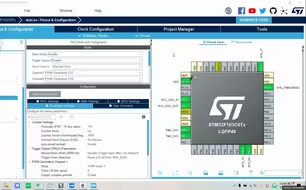
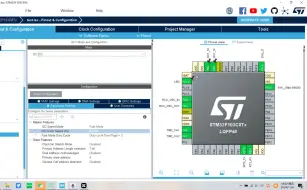
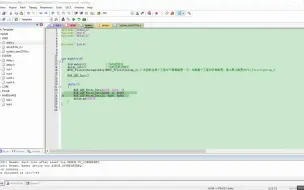
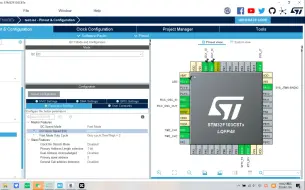
STM32 HAL库&CubeMX教程(第7集--MPU6050&OLED的使用1)
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
Mamba主宰多目标跟踪!卡尔曼滤波居然Out!动态场景处理的下一城
吹爆!全网最通俗易懂是目标追踪算法与实战,大佬带你3小时快速入门 Deepsort/YOLOv5/目标追踪
STM32 HAL库&CubeMX教程(第9集--MPU6050&OLED的使用3)
【智能小车】用Arduino开发的电子悬挂小机器人~ Arduino智能小车 创意开发作品集 智能车型机器人
Deepsort目标跟踪算法原理详解+项目实战,半天带你搞定deepsort算法!(深度学习/计算机视觉)
巴特沃斯滤波器由一些极点和零点构成。而且这些极点和零点是共轭对,也就是实部一样,虚部互为相反数。
STM32 HAL库&CubeMX教程(第10集--MPU6050&OLED的使用4)
软件篇2.4——ws2812b彩灯代码讲解
设计了一个可以戴手上的PCB,功能很强大?PCB设计定制 手指传感器 集成设计PCB
STM32 HAL库&CubeMX教程(第8集--MPU6050&OLED的使用2)
平衡小车pid算法|APP调参过程演示
这爆破水平可还行?
硬件篇——硬件方案整体概述
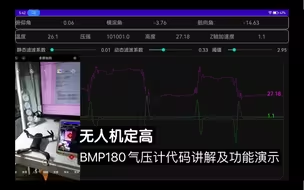
无人机定高|BMP180气压计代码讲解及功能演示
奥本海姆@MIT《信号与系统|MIT RES.6.007 Signals and Systems 1987》中英字幕(豆包翻译
软件篇2.1——ws2812b彩灯原理介绍
Yolo v8惊人的目标识别能力
软件篇1.1——gpio初始化精讲(上)
MIT《机器视觉|MIT 6.801 Machine Vision, Fall 2020》中英字幕(豆包
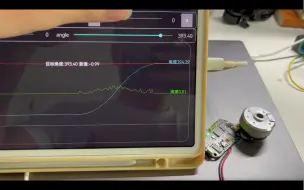
无刷电机-位置环测试效果
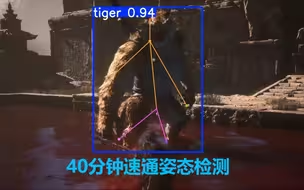
【教程】基于黑神话悟空的yolov8姿态检测
STM32 HAL库&CubeMX教程(第3集--3种串口发送API差异点的对比)
STM32 HAL库&CubeMX教程(第4集--2种串口接收API的使用)
STM32 HAL库&CubeMX教程(第6集--定时器中断的使用)
无刷电机-速度&位置环测试效果
无刷电机的控制美学,这也太优雅了
程序员必刷经典算法题(2)--分糖果问题
家人们,我的平衡小车终于调好了
不错的样子!虚幻引擎 5 人群模拟
程序员必刷经典算法题(1)--岛屿数量
成功!星火大模型API调用测试!
平衡小车 & pid算法 | 三个参数的调节效果演示
蓝牙上位机:波形显示和数据记录实战