V
主页
A Distributed Processing Approach for Smooth Task Transitioning in SHC
发布人
https://www.youtube.com/watch?v=ceM-HqMbgss A Distributed Processing Approach for Smooth Task Transitioning in Strict Hierarchical Control A hierarchical control framework is proposed, in which multi-robot systems can rely on a distributed processing approach that enables the minimization of computational costs, and guarantees smooth and continuous task/constraints transitions when the priorities inside the hierarchy are changed. The approach is tested during three task transitions, for different tasks such as constrained trajectory tracking, obstacle avoidance, and postural optimization. Two mobile manipulators are used, each having 10 DoF, and the results confirm the smoothness of the generated solutions. This work was carried out within the framework of the project "RAISE - Robotics and AI for Socio-economic Empowerment” and has been supported by European Union - NextGenerationEU.
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
人形机器人灵巧手臂最新成果
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
通过优化理论指导设计双足以达到控制和任务的最优
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
NASA’s first humanoid robot Valkyrie is being tested in Australia
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
MPC and RL, two different roads to legged locomotion, and that's OK
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
基于分层优化的四足机器人全身运动控制搬运重物
Bipedal Safe Navigation over Uncertain Rough Terrain
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
ICRA 24 Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Humanoids
对象说就叫:小 狗 军 团 🐕
赛博仙女棒研发成功
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
心善的波士顿动力见不得美军吃一点苦
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
真牛!这个人形机器人吊打很多厂家的“产品”
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Explanation of How Quatro Works
Reinforcement learning for blind stair climbing with legged and wheeled robot
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
幽灵机器人 Ghost Robotics - Vision 60
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
呐, 这就叫优雅~
Highly dynamic gaits controlled by a whole-body MPC
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
Tutorial - Crocoddyl - Nicolas Mansard
The legged robot whole-body State RVIZ plugin
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
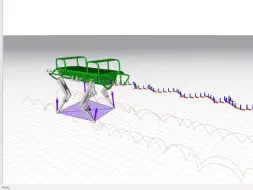
Online trajectory optimization for dynamic aerial motions of a quadruped robot
Boston Dynamics Stretch at MODEX 2024
人形机器人 手指机械结构
基于Q-learning求解机器人路径规划问题
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
How to design nonlinear MPC with deep learning prediction model