V
主页
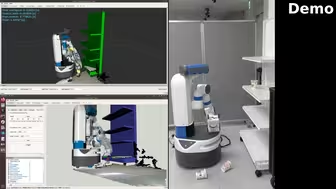
An Efficient and Versatile Framework for Multi-Contact Optimal Control
发布人
https://www.youtube.com/watch?v=wHy8YAHwj-M Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control (ICRA-20) Carlos Mastalli et al. Abstract— We introduce Crocoddyl (Contact RObot COntrol by Differential DYnamic Library), an open-source framework tailored for efficient multi-contact optimal control. Crocoddyl efficiently computes the state trajectory and the control policy for a given predefined sequence of contacts. Its efficiency is due to the use of sparse analytical derivatives, exploitation of the problem structure, and data sharing. It employs differential geometry to properly describe the state of any geometrical system, e.g. floating-base systems. Additionally, we propose a novel optimal control algorithm called Feasibility-driven Differential Dynamic Programming (FDDP). Our method does not add extra decision variables which often increases the computation time per iteration due to factorization. FDDP shows a greater globalization strategy compared to classical Differential Dynamic Programming (DDP) algorithms. Concretely, we propose two modifications to the classical DDP algorithm. First, the backward pass accepts infeasible state-control trajectories. Second, the rollout keeps the gaps open during the early “exploratory” iterations (as expected in multiple-shooting methods with only equality constraints). We showcase the performance of our framework using different tasks. With our method, we can compute highly-dynamic maneuvers (e.g. jumping, front-flip) within few milliseconds. Pre-print of this paper can be found here: https://cmastalli.github.io/publications (Publications)
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
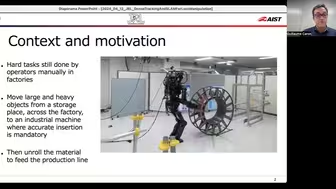
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
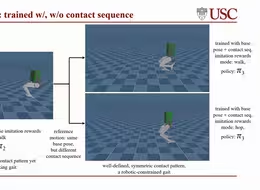
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
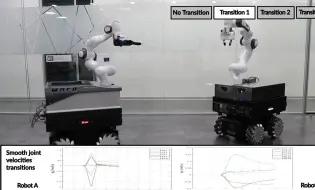
A Distributed Processing Approach for Smooth Task Transitioning in SHC
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
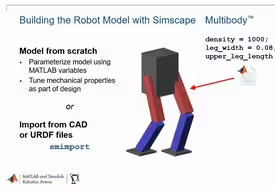
双足机器人的建模与仿真 MATLAB and Simulink
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
Deep Compliant Control for Legged Robots
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
Impact-Aware Bimanual Catching of Large-Momentum Objects
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
IHMC Atlas autonomous path planning across narrow terrain
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
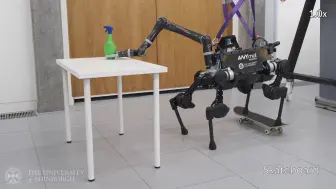
Learning whole-body manipulation for quadrupedal robot
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
Bipedal Locomotion Reward Learning from Demonstrations via Inverse Reinforcement
Bipedal Safe Navigation over Uncertain Rough Terrain
(ICRA 2024) Actor-Critic Model Predictive Control
双足机器人步态生成 MATLAB and Simulink
Versatile Skill Control via Self-supervised Adversarial Imitation
基于模型控制的人形机器人行走 MATLAB and Simulink
A Feasibility-Driven Approach to Control-Limited DDP
6-DOF Pose Estimation combining Deep Learning Object Detection
单腿站立 轻轻松松 Atlas KarateKid
Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model
不错,优雅,专业!
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Contact-Implicit MPC: Controlling Diverse Quadruped Motions Without Pre-Planned
why choose model based reinforcement learning
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
DTC: Deep Tracking Control 1
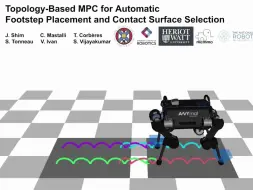
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
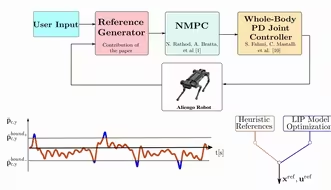
Optimization-Based Reference Generator for Nonlinear Model Predictive Control
MIT Mini-Cheetahs looking for a new home