V
主页
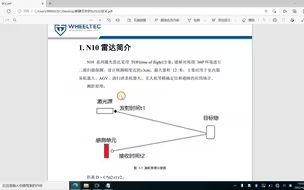
手把手教你如何通过STM32与N10激光雷达实现小车跟随
发布人
全面讲解如何通过STM32读取N10激光雷达数据并实现机器人小车跟随功能,从激光雷达详解到源码完全讲解,教你如何实现跟随功能,视频相关资料见评论区~
打开封面
下载高清视频
观看高清视频
视频下载器
手把手教你如何通过STM32与N10激光雷达实现小车避障
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
激光SLAM的入门讲解视频教程(二)|SLAM实现方向及其拓展
激光SLAM的入门讲解视频教程(四)|liosam工程实现和代码模块讲解(上)
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
【平衡小车之家】STM32自平衡小车套件 PID控制 倒立摆 MPU6050
stm32,pid寻迹小车,南昌航大
开箱实测 | 轮趣科技与镭神智能联合推出新款N10激光雷达
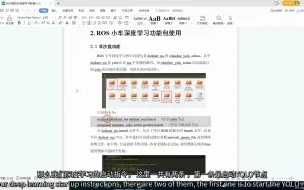
深度学习系列教程|02通用物体识别与手势控制小车
代码全开源!基于STM32实现二阶倒立摆功能讲解
WHEELTEC推出全新ROS多机编队功能——基于镭神智能M10雷达
激光雷达卖疯,特斯拉纯视觉错了?
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
激光SLAM的入门讲解视频教程(一)|SLAM简介
ROS2功能系列视频教程 (五)| ROS2 cartographer建图
地下车库自动泊车——依靠激光雷达测距的刹停测试
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
ROS入门教程系列(七)——ROS多机通信设置(WHEELTEC)
WHEELTEC推出新品镭神智能16线激光雷达C16
基于WHEELTEC小车底盘的镭神M10高精度TOF激光雷达效果展示
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
ROS2功能系列视频教程 (七)| ROS2雷达跟随
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
ENVI遥感图像处理实战:基于LeNet-5、AlexNet、VGGNet、GoogLeNet、ResNet实现遥感图像分类实战!深度学习/激光雷达/几何校正
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
ROS2功能系列视频教程 (十一)| ROS2 USB手柄控制
WHEELTEC避障巡线雷达小车新品上线
ROS入门系列教程(五)——ROS传感器介绍(WHEELTEC)
ROS Moveit桌面机械臂进阶视频教程(五)|Moveit_Config参数讲解第一部分
ROS 2D导航原理系列(三)|全局路径规划-概述
ROS2入门系列视频教程 (十)| ROS2话题通信的python实现
ROS2功能系列视频教程 (二)| ROS2键盘控制
2024年TI杯全国大学生电子设计大赛MSPM0G3507开发板宽度小于15cm的轮式小车K210智能识别巡线OLED显示屏教程原理讲解与效果演示代码开源
适配LQR稳摆与能量控制起摆!STM32倒立摆算法全面升级|WHEELTEC
DOM 60适用于机器人的3D激光雷达
ROS入门系列教程(三)——ROS话题(WHEELTEC)
ROS2功能系列视频教程 (四)| ROS2 slam-toolbox建图
ROS入门系列教程|WHEELTEC
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
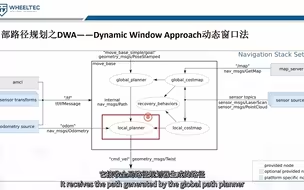
ROS 2D导航原理系列(六)|局部路径规划-DWA算法