V
主页
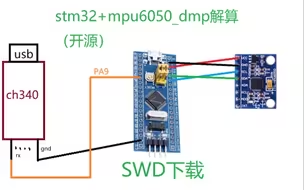
stm32 DMP库姿态解算
发布人
该库移植的arduino的一个开源库,效果比较好,于是移植了过来 原库链接:https://github.com/ElectronicCats/mpu6050 移植的请进群获取776773553
打开封面
下载高清视频
观看高清视频
视频下载器
基于MPU6050的姿态解算(没有使用DMP)
mpu6050+hmc5883l+k64f姿态解算,方向余弦法,磁罗盘加速度计未校准。
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
毕业设计,两轮平衡车,stm32芯片,mpu6050。
[小学生都会的]MPU6050DMP库移植(stm32标准库)
dmp解算mpu6050控制舵机
【求助】MPU6050使用DMP库yaw角不准
我的飞控动起来了!stm32主控+mpu6050加速度传感器+esp8266WIFI模块遥控
研究了一个月的卡尔曼滤波和四元数,今天手动解算姿态角成功。对比一下手动解算和DMP解算。
四元数姿态解算
[铁头山羊stm32入门教程] 6.4. MPU6050(上)
本来还挺喜欢PWM的
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
6050对接dmp库得到姿态角,oled,软件iic用的江科大写的库函数
【嵌入式】STM32HAL库移植MPU6050陀螺仪模块的DMP库实现姿态角解算
【Arduino】MPU6050 测欧拉角 带卡尔曼滤波 自动修正yaw角(附代码)
STM32读取MPU9250姿态数据
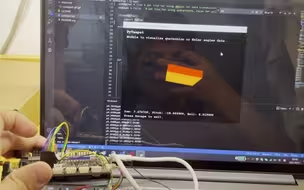
DMP库移植及陀螺仪姿态可视化
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
一只可爱的MPU6050
stm32f407移植陀螺仪
MPU6050 dmp库姿态解算
它来了它来了,开源飞控,它带着代码走来了!(对mpu6050解析不理解的,可以看我最新发布的视频)之前做的stm32飞控,现在代码全部开放,欢迎白嫖
使用MPU6050的DMP库实现roll,yaw,pitch和内部温度传感器的显示(基于STM32F103C8_HAL库)
OV2640
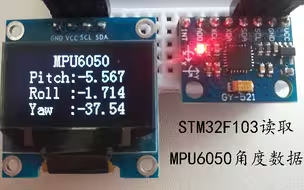
STM32读取MPU6050角度数据
请教个问题,MPU6050初始化完成后,直接读取DMP数据,前30秒的数据在YAW方向在自旋,后面就正常了,到底是怎么回事呢?
普普通通的stm32平衡车
MPU6050+STM32使用DMP进行姿态解算进行两个小项目
电赛H题小车,4题全程序,mspm0g3507+mpu6050,角度PID闭环
mpu6050_DMP库移植到hal库,软件I2C版本
第二阶段:IMU660姿态解算,以及去零飘
mpu6050,从研究到放弃
【电控】调用dmp库获取陀螺仪的姿态角
(演示)mpu6050+esp32 mpy,dmp姿态角运算。三行代码实现调用
STM32+MPU9250+PID+卡尔曼滤波的简易三轴云台
(补录)mpu6050三种常见的滤波方法对比 | 卡尔曼滤波、一阶互补滤波、DMP姿态解算
树莓派-MPU6050-DMP-姿态角解算
MPU6050+DMP获取姿态解析
惯性传感器MPU9250(MPU6050、MPU9150兼容) mac上位机 实验