V
主页
【动作捕捉经典案例】四足仿生机器人步态优化
发布人
为了准确采集机器人的运动步态信息,工程师用NOKOV光学动作捕捉系统,在室外捕捉仿生机器人的运动姿态,用于优化机器人的越障行为。
打开封面
下载高清视频
观看高清视频
视频下载器
【动作捕捉】人体运动分析与步态分析直播Demo演示
【动作捕捉经典案例】六足仿生机器人的运动规划与运动控制
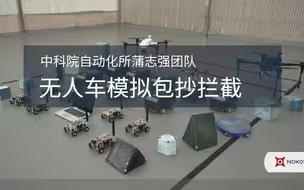
【动作捕捉经典案例】无人车模拟包抄拦截
仿生四足机器人步态规划研究-哈尔滨工业大学郑州研究院
【动作捕捉经典案例】NOKOV动作捕捉用于人体步态分析与动力假肢研究
机器狗的步态分析 动作捕捉集成三维测力平台—南京理工大学机械工程学院
3分钟了解什么是动作捕捉@2022高博会
《自然·通讯》后再登IEEE RA-L!北航研究团队发表基于Mean-Shift的分布式无分配算法 实现精准高效的多机器人队形控制【IROS 2024】
基于传感器的机器人系统运动控制
电液肌肉单腿机器人 灵活的腿 轻巧的腿
坐标系转换如何通过动作捕捉系统操作——NOKOV小讲堂
Moco12缩比MIT Mini Cheetha的8自由度四足机器人3D数模图纸
室内多无人机任务重规划实验-南航自动化学院姜斌老师团队
体育黑科技-篮球训练动作捕捉和数据分析
三维步态分析系统—泰山智慧实验室
🤖保留节目!ICRA 2024机器人游行绕场一周献上集体舞
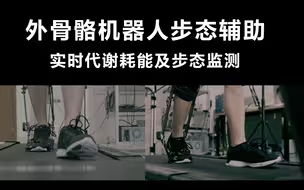
外骨骼机器人步态辅助实时代谢消耗及步态监测-南开大学
浙大高飞老师团队ICRA 2024:基于主动碰撞的轮式机器人路径规划方法
四足机器人,机器狗,冬季远足与KAIST猎犬(完整版)
四足机器人跌落姿态调整 基于强化学习的机器人控制
丢点问题如何通过动作捕捉软件解决——NOKOV小讲堂
人机交互遥操作:力反馈血管介入手术机器人
如何通过VRPN与PX4平台传输动作捕捉数据——NOKOV小讲堂
现场实录-蛇形机器人运动轨迹捕捉
珐格兰丝: 老师您看我学得怎么样
四元数和欧拉角如何通过动作捕捉系统输出——NOKOV小讲堂
空地协同/无人机/无人车在巡检机器人中的应用-武汉科技大学
仿生机器人女友它水灵灵的来了
动作捕捉系统的基础参数介绍——NOKOV小讲堂
Soft Robotics最新成果:人类“第三只手”高效准确完成复杂任务遥操作
动作捕捉系统在运动分析中的应用——NOKOV小讲堂
光学动作捕捉系统原理——NOKOV小讲堂
未知复杂环境的无人机自主目标搜寻 四川大学电信学院杨鑫松老师团队
超雄机器人
增强现实AR-触觉人机交互界面已应用于超声扫描机器人!《方斌对话》直播首邀外籍教授,三人精彩共话人机协同操作!
Semantic Traversability Estimation Using Pose Projected Feature
不同晃动强度下的人体反应-中国地震局地球物理研究所
自主编队Crazyflie无人机
【直播·现场指导】动作捕捉使用培训11/14再度来袭!
使用普通商用零件低成本DIY构建四足机器人然后基于强化学习控制