V
主页
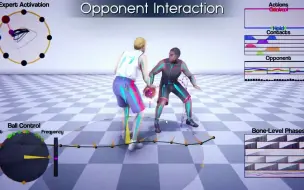
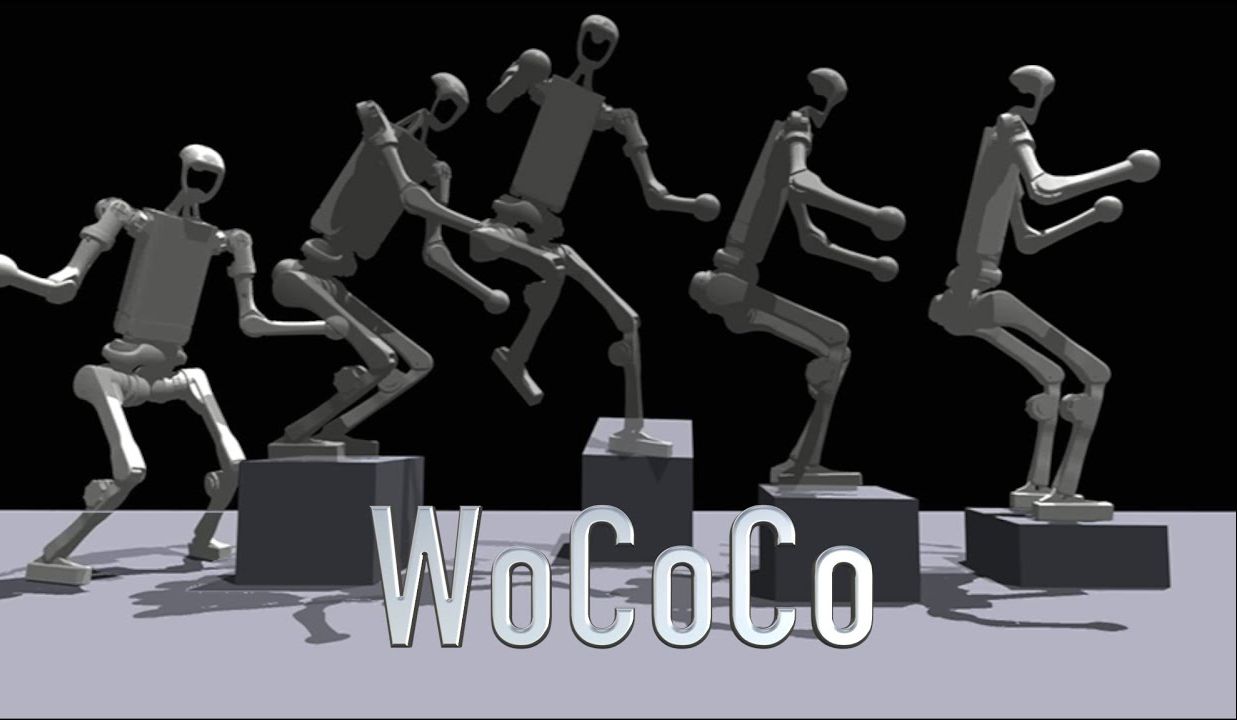
WoCoCo:通过顺序接触学习全身人形机器人控制|2024【卡内基·梅隆大学】
发布人
WoCoCo: Learning Whole-Body Humanoid Control with Sequential Contacts YouTube:https://www.youtube.com/watch?v=L18X-QbXqPI Website: https://lecar-lab.github.io/wococo/ Paper: https://arxiv.org/abs/2406.06005 Authors: Chong Zhang*, Wenli Xiao*, Tairan He, Guanya Shi LeCAR (Learning and Control for Agile Robotics) Lab, Carnegie Mellon University
打开封面
下载高清视频
观看高清视频
视频下载器
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
六足攀爬机器人|2019【日本法政大学】
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
人形机器人“朋友”护理现场演示|2022【川崎重工】
被动动态双足行走:迈向乐高大小人形机器人|2022 ICRA【卡内基·梅隆大学】
无人机学习在空中用机械手开门|2023【苏黎世联邦理工学院】
MenteeBot人形机器人|2024【以色列MenteeBot Robotics】
儿童尺寸人形机器人开放平台:BRUCE|2022【加州大学洛杉矶分校】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
开源Mobile ALOHA:学习双手移动操作|2024【斯坦福大学】
骑自行车的机器人|2020|山口雅彦【日本】
人形机器人Digit:在真正的自动化工作流程中|2024【Digit】
每个人都需要一个口袋大小的机器人助手|2022【Agility Robotics】
快递机器人WAVE:最后一英里交付机器人平台|2023【韩国汉阳大学】
机器人学|2017|杨谷洋【台湾交通大学】
人形机器人Reachy|ICRA 2023【法国Pollen Robotics】
神经步态:学习双足运动|2022【加州理工Caltech】
开源仿生机器腿|2021【密歇根大学】
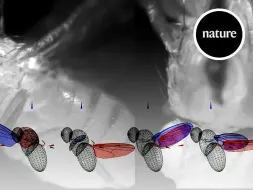
人工智能和机器人揭开了苍蝇翅膀运动的控制机制|2024|Nature【加州理工】
使用语言帮助机器人掌握周围环境|2024【MIT CSAIL】
AI4Animation:基于深度学习的动画角色控制|2022【ACM Trans. Graph】
iCub 3遥操作-虚拟形象系统|2022【IIT】
折纸结构启发的软扭转致动器|2022|SoRo【南方科技大学】
人形机器人:修复人类难以触及的铁路架空电线|2022【西日本铁路JR West】
1X人形机器人:全神经网络、全自主、全1X倍速|2024【1X】
手掌大小的全向移动机器人|2022【日本丰桥工业大学】
消除站立工作痛苦的辅助服|2020【日本アルケリス株式会社】
迪士尼开发尖端自由漫步机器人演员|2021【迪士尼】
变形的机器龟|2022|耶鲁大学【nature】
Apollo人形机器人|2023【美国Apptronik】
Science:AI自主合成化学机器人RoboChem|2024【荷兰阿姆斯特丹大学】
avlmaps:用于机器人导航的视听语言地图|2023【弗莱堡大学】
全自动番茄剪枝机器人Kompano|2021【荷兰Priva】
OpenBot:将智能手机变成机器人|2022【Intel OpenBot】
用语义想象经验扩展机器人学习|2023【Robotics at Google】
瓢虫启发的折纸机器人|2020|韩国首尔大学【Science Robotics】
从视频中学习打网球|2023【斯坦福大学】
宇树G1人形机器人:¥9.9万元起|2024【宇树】
微型类毛毛虫软体机器人|2022【香港城市大学】
具有地理提示的视觉公里级导航|2022【加州大学伯克利分校】