V
主页
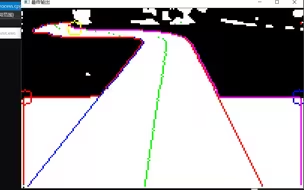
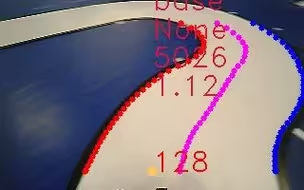
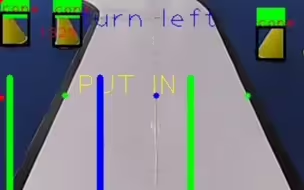
十九届智能车完全模型补线方案,opencv利用vector进行的点重构,堪称完美
发布人
利用vector的点删除和点插入操作来补线方便又快速
打开封面
下载高清视频
观看高清视频
视频下载器
八邻域巡线,程序绝对可以跑,请自行阅读简单移植。
智能车摄像头算法开源啦!灰度,大津,Soble,逆透视,八邻域开源啦
十九届智能车完全模型组全元素
智能车全向组之疯狗模式
18届完全模型
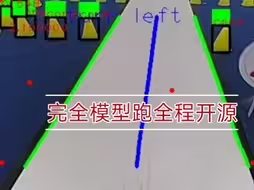
19届智能车完全模型硬跑全程
车车跑的更加丝滑了,有点子智能的样子了,开源群聊:949066823
[开源]_[Opencv教程]智能车巡线代码讲解(番外篇)
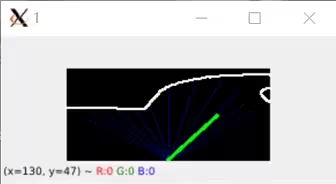
智能车找线算法演示上位机(常规找线方法5分钟写的,不要喷哈,其他算法后续会演示给大家)
《完球模型组》
完全模型不失误概率很小但不为零
八邻域视觉,十字补线程序讲解,智能车竞赛,开源可移植
[开源]_[智能车赛道识别]一种很奇妙的中线~( ´•︵•` )~
有没有大佬会目标检测呀Ծ‸Ծ
学妹说:气垫这么慢都往外甩,埋了吧
3m/s的洒水车
完全模型 超高延迟版
开揍完模逆子~
《完蛋不行组》
学校没经费了,准备弃赛
智能车没有学妹,跑成这样可以进国赛吗
第十九届智能车东北赛区完全模型组,智能车比赛就此结束了,两年的智能车生涯带给了我很多的东西,以后的路还长,带着智能车的故事走向下一个起点
[开源]_Opencv几十行代码实现实时矫正功能(◔◡◔)
智能车完全模型组培训之比赛介绍
内切➕压线,还有两个月咋办啊
摄像头四轮元素补线思路
智能视觉太难了,弃赛了
那年跑的再快也没能跑进你的心里
十九届完全不用模型组
3. 三次曲线拟位置环PD(比模糊pid简单,比分段式pid好用)
pid巡线(失败大哭😭)
十八届智能车完全模型全国冠军 杭州电子科技大学 54.9s(罚时后59.9s)
智能车图像处理进阶——灰度八邻域:简单写了下限制条件,写着玩的,大佬轻点喷。
决赛车车不肯好好入库,只能含泪70s变85s
舵机慢?完全模型组3m为证
小破船能不能给我追上前面那只乌龟
19届完全模型,连续三圈拉练失败
关于全国冠军是怎样炼成的 杭电完全模型 国赛前超长赛道狂飙记录-十八届智能车
2024年百度完全模型组智能车线上赛开源项目讲解
没有学妹带我😭,小车跑不起来,圆环摆烂吧就这样了