V
主页
步态好些了,但是感觉爬楼还是一般,扎心了
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
试验失败系列1号作品:基于transformer的rl policy(希望下次能好点吧…哭泣)
感觉比之前好多了呢(rl运控实验成功系列)欢迎大家给我的repo加star~
基于强化学习的go2 sim2real部署展示(业余爱好大佬勿喷)
不平地形的摔倒恢复实验,自己的狗子实验啊,感觉又是一砸一个坑
人形双足模仿学习强化学习AMP ASE Exbody求助
一次性训了一个带fall recovery 和 velocity tracking的policy,目前步态看着还成
代码库更新系列一:大家快来康康!github :LocomotionWithNP3O
试验失败系列2:基于MANN的policy,其实走的还成,就是上楼梯太暴力了,得再改改…
成功小实验系列1:修改了下reward然后kp30 kd0.75训练以及部署,貌似姿态还改善了呢
试验不咋成功又不咋失败系列1:继续是MANN的policy,但是,调完之后步态还是不咋好看,流泪了
对象说就叫:小 狗 军 团 🐕
摔倒恢复与速度跟随一起训的policy的实际部署效果,摔倒恢复还是有些影响速度跟随的步态
pairwise motion piror与原版amp高速运动对比效果
[上]6个人形双足强化学习开源项目,论文讲解,代码速读,FLD,PBRS,footstep,ExBody,humanplus,humanoid-gym
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
调了如此久,感觉上楼梯稳定性还是差,都开始怀疑自己是不是上楼的时候把腰杆推歪了
双足机器人RL,sim2sim
终于玩上了!在Isaac实现unitree H1的运动仿真
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
遇见G1未来已来?#人形机器人
宇树 H1 升级版 自由度展示#人形机器人
[下]6个人形双足强化学习开源项目,论文讲解,代码速读,FLD,PBRS,footstep,ExBody,humanplus,humanoid-gym
强化学习在ROS2中实现巡线小车
OpenAI o1能像人类一样「深思熟虑」,作者们顿悟了这些问题
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
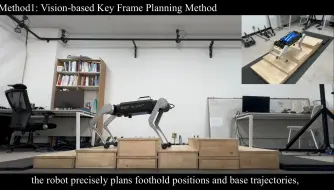
四足运动:用三种不同的方法在崎岖地形上行走
三指灵巧手,强化学习手内灵巧操作连续成功
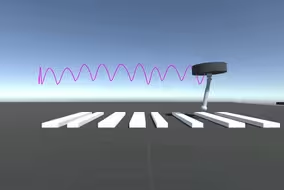
单足跳跃:Reinforcement Learning vs Raibert Heuristic
为什么Isaac gym 读取的速度不等于位置的微分呀,用pd算的力矩不就是错的吗
Points2Plans:从点云到具有可组合关系动力学的长期规划
ALOHA模仿学习ACT真机实践——笨蛋机械臂两天才学会瓶子
无人机穿越树林视觉自主避障
使用普通商用零件低成本DIY构建四足机器人然后基于强化学习控制
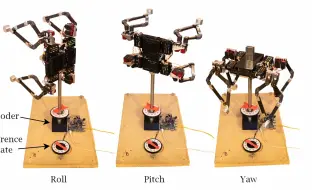
人形机器人腿部结构 基于 4DoF 球面并联机构
Unity使用自己的强化学习算法(DQN)训练智能体——学习日记
健身第98天,15kg弯举,比之前多做了一个,有进步。
通过残差强化学习实现近距离四轴飞行器的稳健控制 四旋翼
往热水里加蜡会发生什么?
FPS鼻祖DOOM重现江湖!仅凭扩散模型颠覆游戏开发革命,每秒20帧实时模拟画面
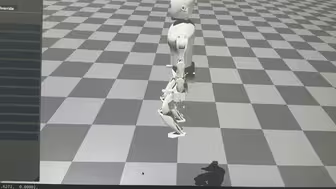
四足机器人跌落姿态调整 基于强化学习的机器人控制