V
主页
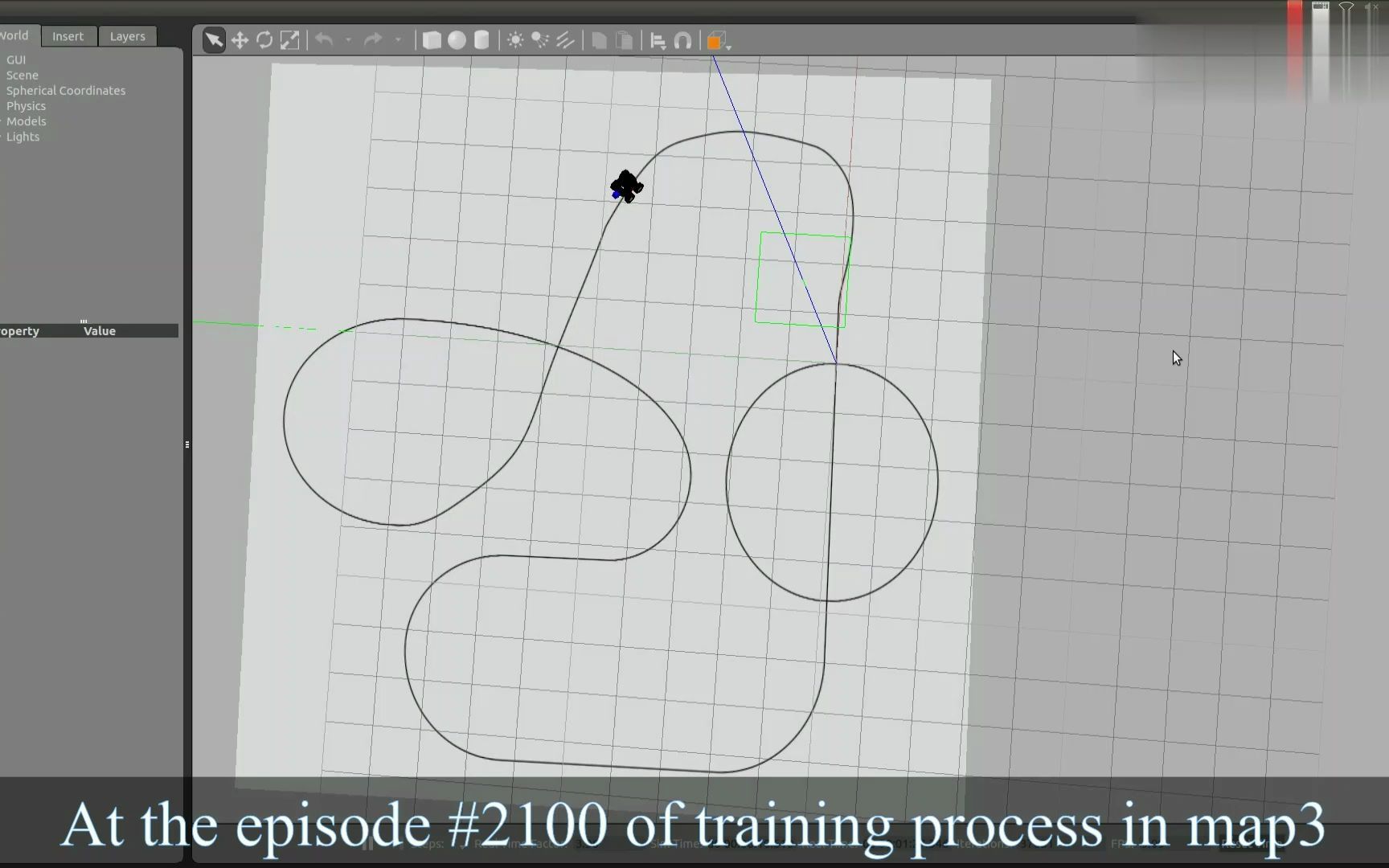
基于深度强化学习自适应SAC-PID控制方法循线机器人
发布人
基于强化学习的自适应SAC-PID控制方法;循线机器人;PID控制器;自适应控制。 感兴趣的伙伴点击链接可以看到文章:https://onlinelibrary.wiley.com/doi/10.1002/rnc.5662 或者搜索SAC-PID,欢迎交流! 同时因为ros gazebo环境不方便各位下载和实验 我重新写了一个SAC-PID方法在github,在pybullet环境中,不加相机的,跟踪目标点! 链接:https://github.com/troyesivanyh/SAC-PID 当然我们还有后续的工作(增加了李雅普诺夫奖励项),详情:https://www.bilibili.com/video/BV1Mr4y1s7jQ/
打开封面
下载高清视频
观看高清视频
视频下载器
八分钟带你学会深度强化学习机械臂推抓系统
如何科学修复,你被色情片损伤的大脑?
车里运动的风景也很美妙
10分钟解释改变世界的新兴技术
科学家用超弦理论和量子计算猜测,你的灵魂就在这里!
替你试了!水火相撞的0.01秒,你会经历什么?
简单有趣的科学小实验,瞬间搞定熊孩子
把一只大蜈蚣和螳螂关一起!会发生什么事?
女生千万不要学化学
哈佛入校测试题,简洁而不简单的方程!
挑战丨魔方从 1 级到 9999 级!
醇催化(两次大失败)T_T
5千伏高压电有多恐怖?看一下这个鸡蛋就知道了
4K超高清科普:水蛭的吸血过程
视力快速回到5.3,这这一招就够了
【十大产业】中国装备制造业:不要停下,直到怒火击穿痛苦,直到泪水流入心脏
直观演示牛顿第一定律
【超燃化学】锰的传奇
教科书式腹腔镜下阑尾切除术手术全过程
每日一题 Day6|求点在黑丝…啊不阴影部分的概率
【25合工大超越(数二)】小河花の讲解です
徐涛老师总结“帽子题”-出发点?落脚点?
实验室制取鞭炮 闲的瞎玩系列
静止的水流和十个最酷的科学装置
蚊子的天敌到底是什么?
世界上最危险的10种酸!硫酸只排第10,第一名堪称“液体核弹”
如果用显微镜看手机
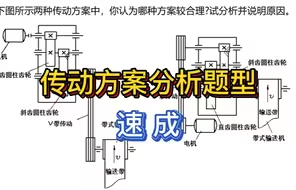
机械设计传动方案分析题型
朱韬数学 初一秋下【最新】11.一元一次方程应用(二)
【齐次化】圆锥曲线超牛技巧!和死算说拜拜!
把电压从11伏变成65000伏
【漫士】姜萍事件最终结局
大冰为什么不结婚
方块滚起来真有这么丝滑么
用最新自制的高倍显微镜观察银杏叶片细胞叶绿体
少年,你对中微子一无所知!中微子到底有何诡异之处?
闪电VS激光, 哪个破坏力更强?
在家利用旧手机制造“手机远程控制器”。
你以为的物理竞赛VS实际上的物理竞赛
康德犯下最大的错误是什么?