V
主页
三菱PLC伺服电机设定-常
发布人
三菱PLC伺服电机设定-常
打开封面
下载高清视频
观看高清视频
视频下载器
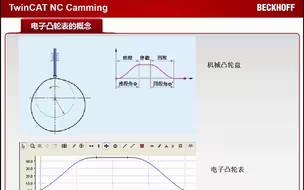
倍福BeckHoff-6.电子凸轮表的原理与介绍
TwinCat3-2.倍福PLC系统架构介绍1
松下伺服-驱动器保存配置文件
EzBendProV5-27.手动操作
EzBendProV5-24.原点设定
倍福BeckHoff-2.通过PLC代码实现电机的简单控制
研华PLC-CodeSys License注册
iBenderV6-PLC原点手动操作
倍福BeckHoff-1.Ethercatdiag
研华PLC-OPC UA授权及CodeSys工程设备替换
松下伺服-驱动器客户端修改电机运转方向
TwinCat3-1.松下伺服清除绝对编码器设置报警及修改电机运转方向的极性
TwinCat3-6.整理完倍福PLC所有程序
倍福BeckHoff-2.Ethercatdiag
宇电仪表AIBUS通信分析及测试(2)
大王工讲解-倍福插补
三菱PLC导入安全密钥
EzBendProV5-23.模具设定-模层设置
iBenderV6-iBender系统环境搭建
EzBendProV5-25.自动运行
EzBendProV5-28.手动试弯
倍福BeckHoff-Twincat3-连接控制器
松下伺服-备份的配置文件下载
倍福TwinCat3.0设定1-王海洋
倍福TwinCat3.0设定4-王海洋
倍福TwinCat3.0设定5-王海洋
倍福BeckHoff-TC3运动控制入门-如何配置NC轴实现点击的简单控制
EzBendProV5-20.登录.创建目录和管件程序
松下伺服-急停引脚设定
倍福BeckHoff-TwinCAT3_编写简单程序
松下伺服-急停设置
倍福TwinCat3.0设置5-王涛
iBender-仿真模拟-bcg文件设置4
倍福TwinCat3.0设置7-王涛
倍福TwinCat3.0设置1-王涛
沪光-双头-欧姆龙HMI操作
倍福BeckHoff-4.电子齿轮的原理与应用(二)
TwinCat3-5.倍福PLC参数变量
基于ModbusTCP实现西门子1200PLC定位控制案例【1】
倍福TwinCat3.0设置6-王涛