V
主页
视觉大模型系列:2.1自监督学习与前置任务
发布人
欢迎加入手写AI 飞书大群 和 添加手写AI vx ( shouxie_ai ) 手写AI 邀请你加入飞书群,快点击https://applink.feishu.cn/client/chat/chatter/add_by_link?link_token=abeo15ad-46a6-458b-83c0-9136290a94c9加入吧! 第一章:大模型技术概述 视觉大模型技术概述 第二章:大模型时代下的 CV 自监督学习的原理与方法 自监督学习与前置任务 对比学习与SimCLR(简化无监督学习流程) 何恺明团队佳作 : MoCo 模型 MoCo 关键代码手写复现 视觉BERT : 掩码重建与BEiT 第三章:视觉基础大模型的架构 视觉transformer: ViT 与其变种 MoCo v3 自监督骨干网络 知识蒸馏框架加持 : DINO 模型 DINO 关键代码手写复现 何恺明一作 : MAE 模型| 小中无码, 便是高清 MAE 关键代码手写复现 分割一切 : SAM 模型 第四章:视觉基础大模型的架构 多模态学习的概念 多模态网络的架构 统一语言和文本 : CLIP模型 CLIP 关键代码手写复现 目标检测新范式 : GLIP模型 800亿参数DeepMind佳作 : Flamingo大模型 开源版GPT-4V : LLaVA大模型 第五章:下游任务迁移与视觉提示 最基础的模型迁移: 线性探测与微调 线性探测与微调关键代码手写复现 更快让网络适应新任务: Adapter Adapter 关键代码手写复现 超越传统微调 : 视觉Prompt 视觉 prompt 关键代码手写复现 下游迁移技术小结 第六章:由课程学员决定进行扩充 以保持课程时效性与对部分内容进行必要的更加深入的讲解
打开封面
下载高清视频
观看高清视频
视频下载器
具身智能多模态基础:1. 视觉大模型技术概述
手写NLP 长期 48_transformer逐行复现
视觉大模型系列:2.2对比学习与SimCLR
具身智能多模态基础:2.4 Moco模型关键代码手写复现
手写AI出品 【Prompt提示学习】逐行手写代码!
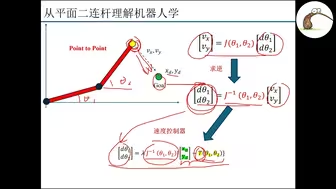
你的具身智能第一课--基础技术路线
isaac sim具身智能仿真系列:【1】管他37 21,装好了仿真就算是具身大佬了(佛系胡乱更新中)
手写一个llama factory—10-DPO训练操作方式
2.3k star的GitHub 大模型 HPC 项目课程上线啦!(作者亲授)
isaac sim具身智能仿真系列:【6】用extension还是standalone app(佛系胡乱更新中)
1.1模型量化概念及意义
英伟达自动驾驶BEVFusion从算法到落地-1.初见
GPT大模型剪枝-4.1OBS(最优脑外科手术)科普
企业真实案例-基于RAG报告生成与问答项目-16-报告生成策略优化
大模型研讨课第一期(共10期)
试听——第六期大模型基础知识
逐行复现多模态模型: 04-vit的embedding部分的实现
详解TensorRT的C++/Python高性能部署,实战应用到项目
isaac sim具身智能仿真系列:【5】动手吧,从操控一个方块开始(佛系胡乱更新中)
1.2 3D生成与重建综述
不会带团队,只能干到死
2024吃透AI大模型(LLM+RAG系统+GPT-4o+OpenAI),3天学完,让你少走99%弯路!
【具身抓取课程-1】机器人基础
【isaac sim-15】具身仿真-你的第一个机械臂程序
手写扩散模型-diffuers介绍
大模型剪枝-5.4sparseGPT-核心代码逐行讲解手写
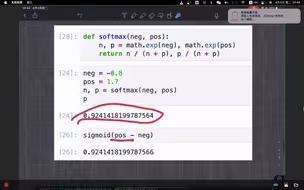
优化小技巧-softmax
pytorch_BiLSTM 命名实体识别 手写代码
带你逐行手写一个New Bing, 让你的 chatglm 接通互联网2
企业真实案例-基于RAG报告生成与问答项目-2-格式化处理1
手写AI逐行手写知识蒸馏:0_课程介绍
5.【逐行手敲解析代码】扩散模型训练代码
1.2 3D重建方法
14-2从零手写模型量化框架 量化卷积gemm
手写一个llama factory——4-环境安装1
手写一个llama factory—8-lora权重加载与推理
【图解】用电影《封神》超形象讲解深度学习attention机制!
手写一个llama factory—14-vscode的debug配置讲解
手写扩散模型-手写一维粒子扩散代码
手写一个llama factory—16-sft代码窥探