V
主页
[7]接收Float类型小数 ABB机器人读写主站Modbus TCP通信
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
[4]03功能码应答报文解析 ABB机器人读写主站Modbus TCP通信
[6]读取int32整形数据 ABB机器人读写主站Modbus TCP通信
ABB机器人使用多任务后台程序实时发送当前位置给ModbusTcp Slave从站RobotStudio 6.08
[8]大小端转换 ABB机器人读写主站Modbus TCP通信
ABB机器人读写主站Modbus TCP通信 读取03功能码读取寄存器值写 单/多个寄存器 RobotStudio实现ModbusTCP通信 Rapid代码
ABB机器人读写主站Modbus TCP通信 读取01功能码线圈值写 单/多个线圈值 RobotStudio实现ModbusTCP通信 Rapid代码
RobotStudio+C#+Halcon视觉+PC SDK+海康威视上位机开发实现虚拟仿真Abb机器人视觉引导之九点标定
[9]大小端转换测试 ABB机器人读写主站Modbus TCP通信
[2]03功能码读取寄存器报文解析 ABB机器人读写主站Modbus TCP通信
ABB上位机使用教程PC SDK开发
视觉测量+视觉引导+ABB机器人二次开发RobotStudio工作站仿真halcon视觉集成开发
[3]03功能码读取报文拼接 ABB机器人读写主站Modbus TCP通信
现场ABB机器人硬件讲解介绍
伯朗特机器人➕海康威视visionmaster 2d视觉引导对软包电池上下料
发那科机器人SDK二次开发Fanuc上位机C#集成robot interfaceV3.0使用教程
VM视觉软件与ABB机器人 平移标定 旋转标定
ABB机器人码垛
ROBOGUIDE+C#+Halcon视觉+PC interface+海康威视上位机开发实现虚拟仿真Fanuc机器人视觉引导九点标定
协作机器人帮助人们解决劳动力工作以及危险性,人机合作的GoFa协作机器人无所不能!
C#控制发那科运动线性/关节/重定位/Fanuc运动控制karel上位机开发
C#联合游戏手柄控制Fanuc机器人运动发那科上位机开发ROBOGUIDE二次开发
ABB机器人手动操作正确步骤
ABB机器人软件应用实操与应用技巧
机器人小课堂EP23:更换主计算机
C#对伯朗特机器人上位机开发BORUNTE二次开发采集机器人当前位置/IO数据采集
宇树科技的竞争对手 | 中国杭州机器人公司|云深处科技 融资过亿|3款机器狗产品 | 了解云深处科技 怎能错过这个视频 | 宇树科技 | 波士顿动力
海康 Visionmaster视觉软件与西门子1200PLC 联合运动 引导抓取
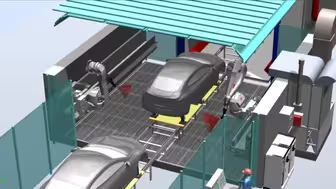
abb机器人,汽车白车身模拟仿真喷涂漆面检测工作站设计,robotstudio仿真
平板电脑+游戏手柄遥控控制发那科机器人运动fanuc机器人二次开发上位机开发
无线游戏手柄控制伯朗特机器人运动BORUNTE二次开发可以摇机和定点一键开启
RustRover:Rust 开发者的 Rust 专属 IDE,且免费!
上课当众秀“黑客技术”,行内人直接笑尿了,真正的黑客应该掌握这六点!
如何使用SpringBoot实现大文件 上传、断点、续传、秒传功能?3分钟流程演示及代码分享!
如果用Scratch做跳一跳
机器人小课堂EP22:增量功能的使用
原来晚上下班后,还可以搞这么多事
马斯克都在围观的最新AI编程工具有多牛?不仅会自动写功能代码,还会自动帮你部署上线
7个很有用的vim的快捷键功能组合
马斯克峰会大爆料:未来极度繁荣,人类将不再需要工作
Python零基础入门到精通(2024最新版)