V
主页
【UWB 抗烟尘SLAM】Range-SLAM: Ultra-Wideband-Based Smoke-Resistant Real-Time Localiza
发布人
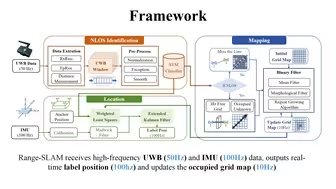
【UWB 抗烟尘SLAM】Range-SLAM: Ultra-Wideband-Based Smoke-Resistant Real-Time Localization and Mapping 这篇论文介绍了Range-SLAM,一种实时、轻量级的SLAM系统,旨在解决烟雾等恶劣环境中定位与地图构建的挑战,使用超宽带(UWB)信号来实现。在能见度低的环境中,光学传感器如LiDAR和摄像头表现不佳,而UWB信号则为实时定位提供了稳健的替代方案。该系统使用通用的UWB设备,实现了无需依赖昂贵的LiDAR或其他专用硬件的精确地图构建与定位。通过仅利用UWB传感器与锚点之间的距离和接收信号强度指示(RSSI),结合标记设备携带体的运动以及光线投射算法,实时构建二维占用栅格地图。为增强在恶劣条件下的定位性能,系统采用了加权最小二乘法(WLS)。通过在充满烟雾的环境和模拟场景中进行的大量实地实验,验证了该系统的高效性与稳健性。 ArXiv: https://www.arxiv.org/pdf/2409.09763
打开封面
下载高清视频
观看高清视频
视频下载器
【UWB 在线建图】Range-SLAM: UWB-based Realtime Indoor Location and Mapping
【雷达-相机协同定位】LiDAR-Vision Tightly Coupled Collaborative Positioning
【复杂地形自主导航】PUTN: A Plane-fitting based Uneven Terrain Navigation Framework
【动态环境建图】RH-Map: Online Map Construction Framework of Dynamic Object Removal
【基于动态控制障碍函数的避障】MPC-D-CBF to Safety-Critical Obstacle-Avoidance of Mobile Robot
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
【植被地形自主导航】Wheeled Robots Autonomous Navigation on Vegetated Terrain
A-LOAM-VLP-16 Using Dataset "nsh_indoor_outdoor"
轮足静态障碍物导航避障
9月13日组会:Trajectory-Based SLAM for Indoor Mobile Robots with Limited Sensing Cap
【CoppeliaSim|V-REP】VLP-16+Aloam建图
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
X6飞控搭配UWB模块,为无人机赋能室内导航定位
TC2LI-SLAM: A Tightly-Coupled Camera-LiDAR-Inertial SLAM System
基于ROS2的树莓派自主定位与导航小车
如何产生和解调HRP UWB MMS信号 (IEEE 802.15.4ab)
ORB-SLAM2实操难吗
ORB-SLAM2系统框架解读
微型无人机群SLAM
A-loam based on Scout2
无人机室内自主飞行,和地面站操作
LSD-SLAM系统框架解读
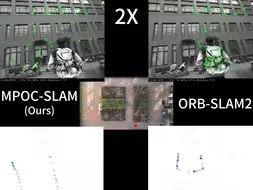
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
基于RGB-D相机的室内主动视觉SLAM-2021-7-1
【机器导盲犬】Quadruped Guidance Robot for the Visually Impaired
2、MetaCam EDU 产品功能及细节介绍