V
主页
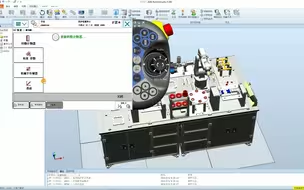
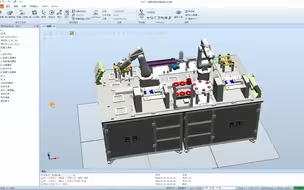
6.1.3装配模块机械装置设置
发布人
自制教学视频,教材为《ABB工业机器人虚拟仿真技术-基于工业机器人应用编程1+X证书考核平台》,高等教育出版社,北京赛育达科教有限责任公司组编。本视频为6.1.3装配模块机械装置设置。 配套资源链接:https://pan.baidu.com/s/1fqdqu0wP7D50IdiVVAzmkA?pwd=h2rf 提取码:h2rf
打开封面
下载高清视频
观看高清视频
视频下载器
6.1.5设置装配模块Smart组件
4.1.3设置平口手爪工具模型
6.1.2变位机旋转机械装置设置
4.1.4创建平口手爪工具机械装置
3.2.5写字路径自动生成
7.1.5添加直线外部轴及设定参数
5.2练习题-1机械装置创建
5.1.3吸盘工具吸放功能测试
6.0电机装配工作站布局及系统创建
2.14.放置曲面绘图模块
3.1.7创建绘图笔工具坐标系
2.1.3工业机器人与实训台布局
4.2.3平口手爪工具自动开合设置
4.3.2电机外壳搬运工作站布局与系统创建
6.3.4_3装配电机转子子程序
6.1.4设置变位机Smart组件
6.2.3_3电机转子装配子程序
2.2.4创建工具数据
5.1.2创建动态吸盘工具
3.2.4记录关键目标点
4.3.6搬运仿真运行
6.1.7平口手爪smart组件
3.1.8创建斜面写字工件坐标系
5.3.4编写RAPID程序
4.3.4搬运组件创建与属性配置
2.1练习题-激光切割工作站布局
6.1练习题-1自动轨迹生成
项目5练习题-6机床1上下料程序编写
6.1.6-1电机转子组装smart组件
5.0码垛工作站布局及系统创建
5.2.2物料输送相关子组件设置
5.3.3机器人码垛路径规划
操作面板的恢复
创建的工具坐标系错误该怎么修改
工作站打包文件的解包方法
3.1.6设置绘图笔工具取放信号
7.1.7直线外部轴的系统标定
2.1.5工具的安装与拆除
工作站无法创建系统的原因
7.2.1工作站系统IO信号设置