V
主页
京东 11.11 红包
运动控制2+画方+状态步方法
发布人
山东济南鲁班自动化培训中心孙老师,互相学习
打开封面
下载高清视频
观看高清视频
视频下载器
200SMART运动控制3 速度插补算法
鲁班学员胡金煜利用面向对象编程思维基于博途和FACTORY实现自动颜色分拣仓储
西门子面向对象编程基于FACTORY实现货物大小自动分拣 2
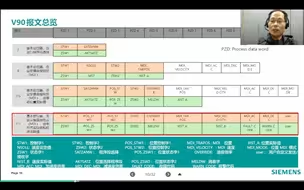
1.4 S7-1500运动控制 V90伺服驱动器常用报文详解
29.西门子1200单轴运动控制-多段定位
labview玩转正运动控制卡_设计思想
汇川easy系列plc ethercat运动控制 伺服读取轴指令和手册解读
TIA Portal V19 运动控制新功能
C#+运动控制实战|基于WPF对接固高轴卡,从零手写企业级实战(.NET6/MVVM/.NET7/.NET Core/多轴)B1097
ethercat伺服4使能和点动指令
49.SCL语言1
46.西门子1200通过 MODBUS RTU与台达变频器通讯控制块封
西门子面向对象编程利用factory实现大小货物自动分拣 1
西门子DB_ANY 多轴控制功能块封装过程(上)
叶强PLC第十期PLC学习顺序及方法
labview玩转正运动控制卡
labview玩转正运动控制卡_主控初始化
第六期TIA标准化训练营_1程序标准化的益处
西门子DB_ANY 用于多轴控制功能块封装过程(下)
啥时候上运动控制
基于西门子TIA的非标设备PLC程序框架
1.23 设置 CPU 属性
PLC位逻辑指令对照表
1200PLC通过PN通讯控制V90伺服实现速度控制
C#工控技术-webapi在生产线中应用
学员以面向对象编程思维进行颜色分拣的项目编程
50.SCL语言2
西门子PLC入门详解
TIA Portal V19 软件重点更新
智慧工厂数字孪生案例分享
C#工业软件远程自动更新升级(精讲)
2.6 西门子官方指令库解析
【Python】人形机器人——全身控制
倍福Codesys面向对象编程(一)FB类、对象、方法与属性
《WinCC组态的50个技巧第2季》04->C#应用程序读取WinCC归档变量值
PLC伺服电机转一圈脉冲数伺服电子齿轮比一次讲明白
西门子1200BY培训第七讲(手动模式、自动模式和初始化模式的实现,以及如何处理错误报警)
5大改善【步进电机】系统精度的妙招,快来看吧
适合自己才是最重要的#努力成为更好的自己 #plc培训 #工业机器人
2024年工博会展后观感