V
主页
1.4 KUKA(库卡)-官方工程师培训4《机器人通讯+机器人系统配置操作WorkVisual(下)》
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
1.8 KUKA(库卡)-官方工程师培训10《培训答疑+程序框架(SICAR标准 上)》
1.3 KUKA(库卡)-官方工程师培训3《机器人通讯+机器人系统配置操作WorkVisual(上)》
1.6 KUKA(库卡)-官方工程师培训8《机器人高级编程(下)》
1.1 KUKA(库卡)-官方工程师培训1 《机器人选型介绍 (上)》
1.8 KUKA(库卡)-官方工程师培训11《培训答疑+程序框架(SICAR标准 下)》
1.3 FANUC发那科-官方工程师培训5《编程与指令讲解(下)》
1.5 KUKA(库卡)-官方工程师培训5《机器人弧焊应用配置操作WorkVisual +机器人基础编程》
ESTUN埃斯顿-官方工程师培训2《机器人编程+程序框架(SICAR)》
1.8FANUC发那科-官方工程师培训10 《机器人程序框架(SICAR标准)》
1.6FANUC发那科-官方工程师培训8《系统参数 +干涉区域+零点标定》
1.1 ABB-官方工程师培训1 《机器人介绍+RobotStudio介绍+典型工作站项目介绍》
1.2 KUKA(库卡)-官方工程师培训2《机器人选型介绍 (下)+机器人基础操作编程》
1.1 FANUC发那科-官方工程师培训1《机器人介绍+仿真软件操作+机器人基本操作(上)》
1.4工业通讯《ModbusTCP协议》
1.4 FANUC发那科-官方工程师培训6《机器人通讯与输入输出信号》
1.2 FANUC发那科-官方工程师培训3《机器人坐标系》
ESTUN埃斯顿-官方工程师培训1《机器人介绍》
NACHI那智不二越机器人视频教程
FANUC发那科机器人编程(共18集)
1.7FANUC发那科-官方工程师培训9《机器人备份原操作+急停安全+日常维保》
1.1 FANUC发那科-官方工程师培训2《机器人介绍+仿真软件操作+机器人基本操作(下)》
工业机器人入门之PLC、ABB robot studio、MCGS联合仿真
1.3 ABB-官方工程师培训5《RobotStudio仿真 机器人管线包干涉检查》
1.6 KUKA(库卡)-官方工程师培训7《机器人高级编程(中)》
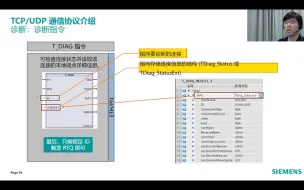
1.3工业通讯 《TCP与UDP协议》
1.5FANUC发那科-官方工程师培训7《机器人寄存器+系统变量 》
郑鼎侯俊霞工业机器人课程 从入门到精通 第1节:工业机器人的应用及发展前景
1.9 PLC-SCL多泵切换算法编程实现(下)
2.6 西门子官方指令库解析
4.9 S7-1500运动控制 凸轮同步功能配置
3.8 报警消息及用户自定义帮助
1.4 TIA Portal 《PLC的存储器结构》
4.2 PLC数组指针及限值可变数组
2.4 PLC-SCL PID回路算法编程实现 功能描述与数学表示
1.4PLC-SCL冒泡排序算法编程实现
3.3 S7-1500运动控制-运动控制功能库
1.10PLC-SCL轮询通讯的时序控制算法编程实现(上)
1.10PLC-SCL轮询通讯的时序控制算法编程实现(下)
1.4 PLC基础编程《实验设备与plc仿真(上)》
2.1 S7-1500运动控制-V90伺服硬件组态+定位轴工艺对象组态