V
主页
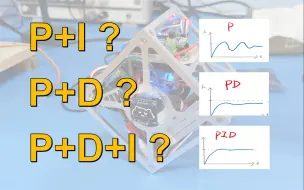
无人机|PID算法详解与实战(上)
发布人
3.1 PID算法入门 3.1.1 PID算法原理 3.1.2 一阶系统PID仿真测试 3.1.3 二阶系统PID仿真测试 3.2 PID算法姿态控制 3.2.1 实际控制中需要考虑的问题 3.2.2 四旋翼姿态控制原理 3.2.3 四旋翼姿态环串级PID仿真测试 3.3 PID算法位置控制 3.3.1 四旋翼高度控制原理 3.3.2 四旋翼高度PID仿真测试 3.3.3 四旋翼水平位置控制原理 3.3.4 四旋翼位置宦串级PID仿真测试
打开封面
下载高清视频
观看高清视频
视频下载器
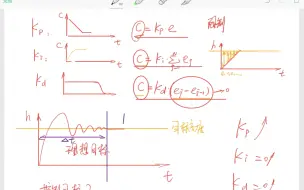
无人机PID内环参数的整定过程记录
从不懂到会用!PID从理论到实践~
【手把手带你做实验第4期】基于Simulink四旋翼无人机PID控制——四旋翼无人机定高控制
PID算法 - 从入门到实战!
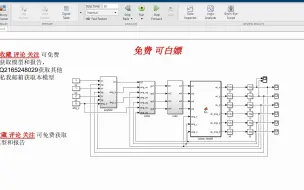
四旋翼无人机仿真 PID仿真模型 simulink仿真
【电赛】PID算法的常用组合和调参步骤 (串级/并级/舵机环/速度环/直立环/转向环/距离环...)
四轴无人机:(10)串级PID控制代码
STM32F103C8T6自制飞控PID调试
四轴无人机:前言
多旋翼无人机PID控制简介
无人机pid调参
记录从零开始制作无人机(38)-两行代码实现PID理解,视频较长建议先收藏!!!
无人机项目开发实战 | 附配套源码,手柄开发+电机驱动+运动传感器……
MATLAB & Simulink 教程:四旋翼无人机轨迹和控制设计(PID + 级联)
【完整版】-多旋翼飞行器理论与实践系列实验-【北航 全权】
四轴飞行器设计视频教程+附送方案(含详细PID视频讲解)
四轴无人机:(9)串级PID控制原理
算是B站飞的最稳的无人机吗?电赛国一作品,悬停/挂重物/识别障碍/拍照
四轴无人机:(11)串级PID参数整定
PID控制算法精讲
基于PID的四旋翼无人机轨迹跟踪控制
《无人机系统设计》在线课程
四轴无人机:(6)单级PID控制原理
【浙江大学】浙大博导带你从0制作无人机
【建议】F450多旋翼无人机PID调试(Pixhawk2.4.8飞控基于Ardupilot固件)
03 飞控算法基础之PID控制
四轴无人机:(7)单级PID控制代码
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
草履虫都能学会的串级PID小实验—基于串级PID控制算法的四旋翼无人机控制系统设计与实现
无人机入门讲解(6)之PID入门·真新手入门
自制的无人机pid分析工具
【2023年无人机系列视频】无人机项目开发与实践(无人机硬件设计,算法设计+航拍教学)
无人机PID参数整定-从理论基础、程序实现到实践应用全过程
【手把手带你做实验第1期】四旋翼飞行器姿态控制建模与仿真
四轴调试初体验,教程整理中敬请期待
四轴无人机:(5)四轴飞机的物理模型分析
学习总结|四旋翼无人机建模、姿态控制、定点位置控制的设计与仿真
记录从零开始制作无人机(45)-记录pid调参过程及,调参的实现方案。实现了从各种翻车到起飞的过程!
STM32-HAL库-MPU6050-自写代码-PID调试-F450无人机
【硬核科普】PID算法从理论到实践【1】 小游戏让你秒懂调参技巧 无人机穿越机玩家必看