V
主页
京东 11.11 红包
可以给自己安装腿的轮腿小车Using Manipulation to Enable Adaptive Ground Mobility
发布人
https://www.youtube.com/watch?v=tt2DQgRiDdk 小机器人能用机械臂给自己安装腿从而像波士顿动力Rhex一样能有更好的越障能力,R. Kim, A. DeBate, S. Balakirsky, A. Mazumdar, “Using Manipulation to Enable Adaptive Ground Mobility,” Proc. of the 2020 IEEE International Conference on Robotics and Auto
打开封面
下载高清视频
观看高清视频
视频下载器
挑战不可能,小型四足机器人下楼梯
MocoMoco 极客的第一只舵狗
MOCO无刷四足研究进展:测试MIT 开源MPC算法 Mini Cheetah四足机器人
Two-wheeled robot - Move using arms 桌面级仿波士顿 Handle轮足机器人
ETH Anymal轮足复合 四足机器人 最新视频 轮足上下台阶 斜坡
超帅的小型舵狗
MOCO ML直驱四足机器人 简单越障碍测试
四足机器人 新技能全向翻滚双面力控
国外极客仿波士顿 轮足机器人最新视频 Two-wheeled robot - Spin
轮足机器人跑跳
全新轮足机器人
足式机器人 公开课
MOCO舵机四足研究进展Moco 12高级定制 赛博朋克2077 四足机器人 缩比模型
双足机器人LOLA 15年的视频
ANYmal Quadrupedal Robot Exploring Satsop Business Park ETH高性能四足机器人自主搜索
3个四足机器人协同搬运
高性能 舵机 四足机器人 欢迎━(*`∀´*)ノ亻!加入群一起讨论567423074
国外仿生四足资讯:基于强化学习和优化结合的四足机器人鲁棒跳跃
moco 12四足机器人 缩比模型 定点转向
家有Anymal[2]小伙自制机械狗,小腿安装挺给力
B站首个四足机器人互动视频,挑战任务1:上下8cm连续台阶(播放时请先关闭右上角自动播放)
国外仿生机器人资讯:目前小尺寸无刷四足机器人最快奔跑记录2.5m/s
基于斯坦福Puppe开源四足机器人的强化学习部署
超越MIT开源四足机器人项目Quad-SDK完整演示
幽灵蛛Pholus-550四足机器人操作使用教程
开源具身智能抓取平台RoboButler
四足机器人台阶优化5 引入ZMP与冲量规划的动态爬行
国外仿生四足资讯:(重磅!!!)极客大佬Josh Pieper无刷mini四足机器人mjbots2020年更新总结
舵狗 四足机器人 动作组编辑教学
MOCO 四足机器人 通用控制器 高级爬行模式
MOCO_8 ML 无刷力控 四足机器人平台 介绍
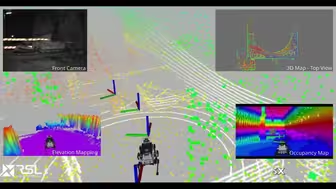
四足机器人 室内雷达视觉slam导航
RoboButler开源具身智能管家
与四足机器人大佬面对面mjbots with Josh Pieper
Vision60 美军军用四足机器人 高性能展示 个人珍藏
MOCO ML开源 无刷四足机器人 力控 步频测试
四足机器人 角动量 落足点选择
moco 通用四足机器人控制器 新步态预告 zmp爬行步态
国产高仿迪士尼开源双足机器人Tinker发布
国外仿生足式机器人资讯: GhostRobotics Vision60 军用四足机器人 高清近照