V
主页
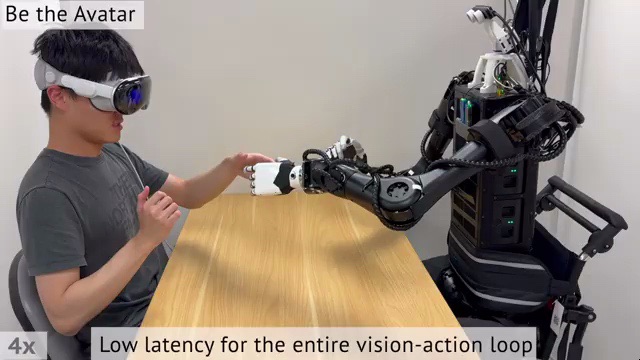
加州大学圣地亚哥分校联合麻省理工开发一款远程控制系统Open-TeleVision应用在H1双足人形机器人上
发布人
加州大学圣地亚哥分校和麻省理工学院的研究员们开发了一款开源远程操作系统,名为Open-Television。 该系统支持多种设备,能够提供实时立体视频流,用户可以通过 VR 头显隔空操控机器人。
打开封面
下载高清视频
观看高清视频
视频下载器
Chat-GPT只是Play的一环 卡内基梅隆大学联合上海交通大学在H1人形机器人身上玩出花来了
秒杀波士顿动力Atlas机器人 清华叉院训练强化学习策略,小成本让H1人形机器人完成跑酷高难度动作
加州大学圣地亚哥分校的6人组华人团队在宇树仿人机器人H1上的研究
斯坦福大学在宇树H1人形机器人上的研究成果
智能精准农业机器人 Husky在陡坡葡萄园推动智能精准农业
[斗山机械臂]力控&柔顺性控制
移动机器人+机械臂3D打印 Large-Scale 3D Printing by a Team of Mobile 大型结构件打印 复合机器人3D打印
灵巧手,进化!
H1双足人形机器人慢跑测试 双足向上弹跳测试 协同搬运测试 16cm高楼梯上下楼测试
移动双臂机器人HUSKY+Dual UR5
大型双足仿人形机器人 宇树科技 H1机器人
移动机器人应用于棉花采摘 农业机器人 农产品自动化 智能农业 农场 UGV用于收割和除草
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
大家好,我是天链人形机器人T1Pro🤝🏻
[斗山机械臂]六轴全力控
2024世界机器人大会现场,开上“高达”了~
机器人在农业场景应用 德克萨斯大学阿灵顿分校采用哈士奇UGV进行植物自动表型分析 HUSKY机器人
免杀真的超级简单,生成即免杀,远控力作!
2024“京天杯”智能导航机器人大赛
博简科学:这么逼真的“人”,你敢触碰吗?
波士顿动力(左)VS 杭州宇树科技(右)
号外:软件都开源啦!宇树人形机器人第一视角遥操作方案。
移动抓取机器人—LABOX韭菜盒子 抓红球实验!集移动、抓取、SLAM视觉识别、定位功能于一体,实现移动抓取的机器人移动平台!
TurtleBot 4开箱视频
UniX AI人形机器人在2024WRC世界机器人大会上的一些小片段
简单的远程控制开关
Husky+UR5e移动抓取集成平台硬件及软件介绍 复合机器人 共融机器人
KUKA IIWA 机械臂集成移动本体Clearpath Ridgeback 末端ROBOTIQ 3-Fingers 高负载移动抓取集成方案
OpenAI投资的1X机器人NEO动作丝滑到让人分不出
用手机APP实时控制 turtlebot3
人形机器人腿部结构 基于 4DoF 球面并联机构
移动双臂机器人核材料装卸和检验 Opening a door with Temoto teleportation 远程摇操作开门
【人形机器人】在Gazebo/Mujoco中的仿真
[斗山机械臂]一键拖动示教功能 — 轻松示教
【农业案例】密西西比州立大学利用自动化放牧系统推进牲畜管理
真正免费好用的远程桌面控制软件 好多人用它远程玩黑神话悟空
这逼真程度?!差点把机器人当成我同事给牵走 | 暴走两万步挤进2024世界机器人大会上人最多的五个展厅
“走着瞧”!Mini人形机器人小派在WRC现场展示!
国产直流伺服驱动器,进口替代,各种电流和电压都可,应用人形机器人关节,四足机器人关节,半导体自动化设备等。大电流1-210A,电压10到800V,各种反馈可支持
中国钢铁侠想打持久战:稚晖君开源了百亿估值研发成果