V
主页
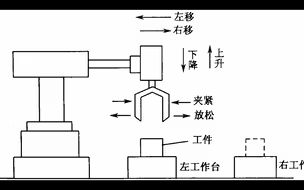
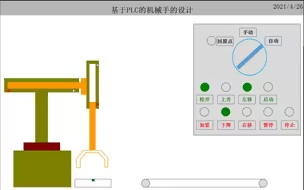
基于组态王的搬运机械手组态模拟仿真 搬运机械手控制系统 机械手组态手动、回原点、单步、单周期、连续5种可选工作方式
发布人
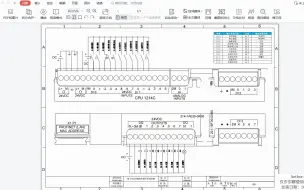
分享:我分享,我快乐;需要本视频中的搬运机械手的组态工程的朋友们,请加我的QQ:2043037623 ;资料QQ发送给大家,谢谢大家的关注与欣赏!基于组态王6.55的搬运机械手组态模拟仿真,用组态王脚本写的;不用连接PLC就可以模拟运行,组态王里模拟运行;搬运机械手系统设有手动、回原点、单步、单周期、连续5种可选工作方式。配套有【基于PLC的搬运机械手控制系统的设计】论文分享,论文内有PLC程序和IO点表、流程图。
打开封面
下载高清视频
观看高清视频
视频下载器
基于plc的机械手控制。可以帮忙做基于plc的论文设计,包括plc程序设计和组态模拟,有需要私信
1200机械手仿真运行(动画版)
基于S7-200 PLC和组态王机械手搬运控制系统
组态王机械手基本动画,可自行添加背景以及注释,机械手演示视频,plc三菱组态王仿真
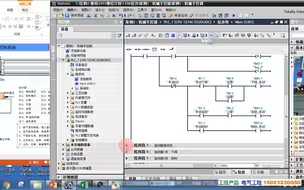
基于西门子1200PLC+HMI组态的工业机械手仿真控制系统
基于MCGS和PLC的机械手控制系统设计
10分钟用组态王软件设计一个简单的交通灯(学习笔记)
基于HMI滑台移动组态设计(机械手)
西门子-基于PLC的机械手材料自动抓取和搬运系统 S7-1200
6.实战第六课1小节用MCGS昆仑通态做一个两轴机械手画面准备
基于西门子博图1200PLC的搬运机械手搬运机械臂组态模拟仿真 搬运机械手机械臂控制系统 机械手机械臂组态手动、回原点、单周期、连续,急停,速度控制,搬运计数
组态王水箱水位监控系统
气动机械手搬运讲解
组态王 自动配料装车系统控制组态模拟仿真 四节传送带控制系统组态模拟仿真 自动配料装车 组态王6.55开发 PLC程序
【20分钟组态王】z21-搬运机械手控制
机械臂_组态王_PLC
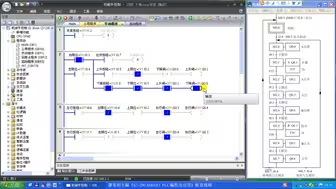
机械手顺序控制的程序调试
77.S7-1200视频077案例2:机械手控制系统-手动和自动程序
【组态王】机械手监控系统
基于组态王的自动售货机组态仿真 自动贩卖机 组态王 自动售货机
基于组态王的水塔水位控制模拟组态仿真 水塔水位控制模拟 组态王 组态仿真
组态王 大小球分拣系统组态仿真 大小球分拣模拟仿真 机械手分拣大小球 组态王
基于 组态王 机械手 动作模拟 PLC控制 组态仿真 组态监控机械手
跟我学组态王第六集二维机械手下
基于 组态王 自动送料装车系统 模拟仿真 组态模拟 自动运料 自动小车
组态王视频教程
基于组态王的物料分拣模拟组态仿真 物料分拣 邮件分拣 自动分拣机 组态王6.55
打开组态王工程运行仿真的操作教程 组态王运行模拟
PLC机械手设计
基于西门子PLC的机械手的设计 博途v15
plc的智能机械臂机械手控制系统
跟我学组态王第六集二维机械手上
组态王软件教程
【组态王】自动灭火系统组态工程设计
搬运机械手设计-四自由度圆柱坐标气动机械手设计
组态王 电机正反转 电机调速 模拟仿真组态监控 组态王 电机正反转 电机调速 李浩文
基于组态王的送料机械手系统
基于 组态王 机械手 动作模拟 PLC控制 组态仿真 组态监控机械手 西门子200PLC
基于组态王的机械手系统
基于PLC控制的机械手系统控制讲解视频