V
主页
京东 11.11 红包
【搬】有关PX4混合系统的Control Allocation介绍
发布人
https://www.youtube.com/watch?v=xjLM9whwjO4 在 PX4 堆栈中,控制器的输出通过混合器转换为执行器命令。尽管对于内部人员来说非常强大,但当前的混合系统对用户并不友好,并且仅限于静态配置。在本次会议中,我们将介绍正在进行的控制分配工作,旨在补充甚至替代当前的混合系统。未来的控制分配模块承诺更容易和更灵活的机身配置,同时实现新的功能,例如倾斜旋翼过渡的连续控制和执行器故障的处理。
打开封面
下载高清视频
观看高清视频
视频下载器
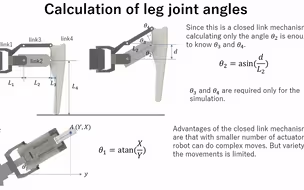
Course 'Control of legged robots'. Lesson1, part2
A股紧急提醒,周二散户千万要注意了
11月5日 排列五规律讲解
Course 'Control of Legged Robots'. Lesson4, part2
Course 'Control of Legged Robots'. Lesson2
[虚幻引擎 UE5]如何制作交互草材质
Autonomy Talks - Marko Bjelonic:轮足机器人的混合运动规划与控制
Course 'Control of Legged Robots'. Lesson5, part1
TED演讲:变聪明的秘诀是运动完学习
【搬】使用四足机器人爬上坚固的梯子
【纱布/考研/115限定】考研上岸强效助推器/我默记这段路的酸楚 等来年春暖花开之时再赏心阅读/俯首再战百日朝暮 提笔写尽十八春秋/发光不是太阳的权利你也可以
【ノリノリ】是什么意思?
【25考研政治】肖秀荣背诵手册带背Day15 | 核心考点详解
(SCI论文必看)(加入多种多目标优化算法和帕累托前沿解)基于五种2024最新智能算法优化BP神经网络的多目标参数寻优(多目标海鸥鲸鱼遗传灰狼鱼鹰蜣螂等)
20天掌握造型逻辑的蜕变案例
别说AI有没有用了,快点用起来吧!
关于背书,这是我压箱底的办法了!!
Rider免费啦!|Unity最佳代码编辑器安装配置及使用技巧
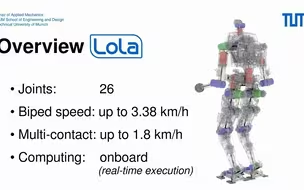
【搬】人形机器人 LOLA - 自主多接触运动的行走模式生成
Qt/C++ 个人博客系统 1.0.4|Qt for Webassembly 应用实战(瞎搞)
【搬】Multi-legged robot theory
先收藏!操作系统4小时核心考点冲刺串讲!(强化阶段使用!含题型总结!)
第117集:路灯白天亮,晚上不亮,差点把我整不会了
Hierarchical and Nonlinear Control Algorithms for Robust Quadrupedal Locomotion
3D打印双料支撑设置教程
《安富莱嵌入式周报》第345期:开源蓝牙游戏手柄,USB3.0 HUB带电压电流测量,LCR电桥前端模拟,开源微型赛车,RF信号扫描仪,开源无线电收发器
初识python,环境配置,编程基础以及数据类型
从零训练专属模型!用ESP32-S3玩转边缘计算模型
15分钟详细讲解 | 什么是未来超级连接 ESP-NOW
【搬】基于NVIDIA Jetson的USB Cameras应用讲解
【PS教程】别再到处找了!100集(全)从零开始学Photoshop软件基础(2024新手入门实用版)PS2024零基础入门教程!!!
【中介不会告诉你的系列8】 30-39岁,日本大龄留学/就业底层逻辑,来日本前必看的解说 ,2024日本留学,日本移民,日本语言学校 日本专门学校 职道日本
Whole-Body Control of Series-Parallel Hybrid Robots
【搬】OTV 8C测试飞行
【建议收藏】新手如何学习文献整理?看过的文章如何才能不白看?适合新手且无痛的文献整理方式!
【搬】爬楼梯小车
西班牙世纪大洪水:已夺命214人,救援却比天灾还离谱!
英语基础差但一次就分手!雅思考前2周备考攻略和得分技巧!|听力、阅读、口语
Michiel van de Panne (UBC)_ MPC and RL, two different roads to legged locomotion
学人工智能,哪5大数学理论最关键?