V
主页
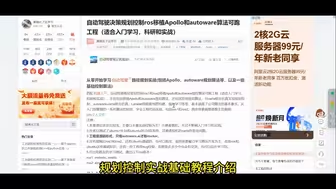
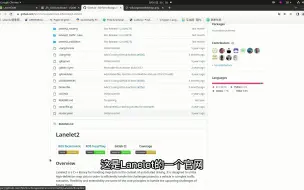
自动驾驶路径规划-控制决策入门学习
发布人
基础代码(ros移植Apollo和autoware主流规划算法,包括Lacttice算法,EM算法等,可以实现避障,停障等功能,可以用来对接实车,做科研实验) carla单独代码(carla自动驾驶仿真平台,实现了仿真平台跟ros规划算法的接口,做科研实验和公司工作使用,注意本代码不包括ros移植的规划算法) lanelet(地图框架的显示与全局规划,可以用于实车的地图构建方法教学)
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习-变道规划算法效果演示
被PPO算法惊艳到了--自动驾驶强化学习决策规划工程-PPO算法实战
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
从零开始学习自动驾驶决策规划实战基础教程介绍
自动驾驶路径规划入门-JOSM的使用
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划入门-JOSM的使用
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划-Lanelet教程
自动驾驶路径规划实车工程参数简介
自动驾驶路径规划-控制决策入门学习
自动驾驶决策规划论文交流(三)自动驾驶端到端论文
自动驾驶决策规划论文专题交流(二):Motion Planning for Autonomous Driving
深度强化学习算法carla平台实战-PPO算法
自动驾驶路径规划算法入门-autoware的实战使用
自动驾驶路径规划ros-carla联合仿真使用
自动驾驶强化学习决策规划carla实战-ddqn算法
重磅推出ros2版本自动驾驶决策规划算法移植工程
深度强化学习Carla实战-SAC算法(二)--SAC-Carla训练过程
自动驾驶路径规划-控制决策入门学习
自动驾驶路径规划算法入门-autoware的实战使用
自动驾驶决策规划ros移植Apollo的em算法lattice算法等
自动驾驶学习决策-carla仿真轨迹预测演示
自动驾驶深度强化学习DRL-遮挡探头场景demo 训练全过程
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶决策规划ros-carla泊车停车场联合仿真实战(一)
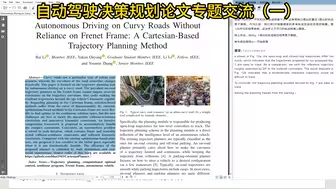
自动驾驶决策规划论文专题交流(一)
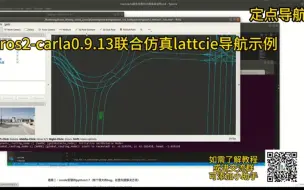
自动驾驶决策规划学习之ros2-carla0.9.13联合仿真lattcie导航示例
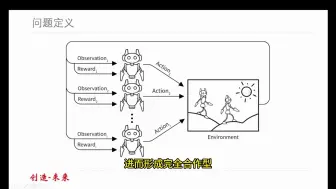
自动驾驶多智能体深度强化学习-入门知识
自动驾驶路径规划算法入门-Autoware.ai-carla联合仿真使用介绍
自动驾驶路径规划交流会之--求职篇
自动驾驶carla ros仿真Apollo移植算法调试