V
主页
京东 11.11 红包
Simple Agent, Complex Environment: Efficient Reinforcement Learning with Agent..
发布人
Simple Agent, Complex Environment: Efficient Reinforcement Learning with Agent State by Benjamin Van Roy (Stanford), March 10, 2021 Abstract: I will describe a reinforcement learning agent that, with specification only of agent state dynamics and a reward function, can operate with some degree of competence in any environment. The agent applies an optimistic version of Q-learning to update value predictions that are based on the agent’s actions and aleatoric states. We establish a regret bound demonstrating convergence to near-optimal per-period performance, where the time required is polynomial in the number of actions and aleatoric states, as well as the reward averaging time of the best policy among those for which actions depend on history only through aleatoric state. Notably, there is no further dependence on the number of environment states or averaging times associated with other policies or statistics of history. Bio: Benjamin Van Roy is a Professor at Stanford University, where he has served on the faculty since 1998. His research focuses on the design, analysis, and application of reinforcement learning algorithms. Beyond academia, he leads a DeepMind Research team in Mountain View. He is a Fellow of INFORMS and IEEE
打开封面
下载高清视频
观看高清视频
视频下载器
The Provable Effectiveness of Policy Gradient Methods in Reinforcement Learning.
Safe and Efficient Exploration in Reinforcement Learning by Andreas Krause
Learning-based Koopman Modeling for Efficient State Estimation and Control ...
Data-driven MPC: From Linear to Nonlinear Systems with Guarantees by F. Allgöwer
Data-Driven Dynamical Systems and Control by Steve Brunton
Driving the Elephant through the Landscape of Deep Networks Stefano Soatto
Modeling for Multi-Agent Collaboration by Monroe Kennedy III
Leveraging Learning & Opt.-based Planning for Multi-Robot Systems by P. Tokekar
Learning for Decision-Making under Uncertainty by Bartolomeo Stellato
Safe, Interaction-Aware Decision Making and Control for Robot Autonomy by Pavone
A Constrained Control Perspective on Safe Learning-Based Control by M. Zeilinger
The Long and Short of Stochastic Stability in Multi-Agent Systems by Jeff Shamma
"Industrial Potential of Reinforcement Learning" Panel Discussion @ IFAC2020
IFAC Industry Connect: Machine Learning and Control
Safe Exploration in Reinforcement Learning by Andreas Krause (ETH Zuerich)
Equivariant Observers: Robust Nonlinear State Estimation for Robotic Systems
Multi-fidelity Gaussian Processes for Human-Agent Teaming by Vaibhav Srivastava
On the Structure of Learning: What’s in the Black Box? by Patricio Antonio Vela
Fast and Flexible Multi-Agent Decision-Making by Naomi Leonard @ CDC 2023
Real-time Distributed Decision Making in Networked Systems by Na Li
The Role of Adaptation in Learning, Safety, and Optimality by Anuradha Annaswamy
Robot and Remote-controlled Machine Technology for Accident Response and ...
Distributed Machine Learning over Networks by Francis Bach @CDC2019
Regret-Optimal Control by Babak Hassibi
Robots Interacting with Humans and Unknown Worlds by Alin Albu-Schaeffer
Data Auctions with Externalities by Munther Dahleh
Control Has Met Learning: Aspirational Lessons from Adaptive Control Theory
The Non-Stochastic Control Problem by Elad Hazan
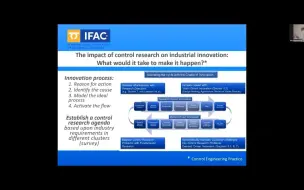
IFAC Industry Connect : The Impact of Control Research on Industrial Innovation
Towards Safe & Resilient Autonomy using Synergistic Control, Observation and ...
Contraction Analysis in Optimization, Learning, and Adaptive Prediction &Control
Why Would We Want a Multi-agent System Unstable? by Mrdjan Jankovic @ACC2023
Gradient based Methods for Control and Learning of Dynamical Systems by M. Fazel
Learning Certifiably Safe Control for Large-scale Autonomous Systems by C Fan
Reinforcement Learning for Process Control and Beyond by Jay H. Lee
Genetic Circuit Engineering Meets Control Theory by Domitilla Del Vecchio
Physics-Guided Data-Driven Modeling for Control in Additive Manufacturing
Direct Adaptive Learning of the LQR by Florian Dörfler
Data-driven Input-to-state Stabilization by Andrea Bisoffi
Regulation-Triggered Batch Learning: A New Hope For Applied Adaptive Control