V
主页
Vlog | 北大学神、MIT在读博士带你逛麻省理工机器人实验室!一起开启MIT Lab Tour!
发布人
12月30日晚8点, 麻省理工学院计算机系在读博士—李昀烛将在将门TechBeat技术社区分享Talk《基于深度学习的动力学建模、物理系统推断和机器人操作》。预约请点击https://datayi.cn/w/a9a7amGP,马上安排!
打开封面
下载高清视频
观看高清视频
视频下载器
MIT在读博士生李昀烛:基于深度学习的动力学建模、机器人操作和多模态感知
Vlog | 港科大机器人研究所长这样?超炫酷Lab Tour来啦!
Talk | 清华大学在读博士生李一鸣:后门攻击简介
马斯克确认Tesla Optimus Gen 2的生产价格为1万美元!
Talk预告 | CMU在读博士生辛书冕: Non-line-of-sight (NLOS) Imaging
Talk精华版 | MIT在读博士生李昀烛: 基于深度学习的动力学建模、物理系统推断和机器人操作
走!一起去 MIT 体验功能性磁共振检测
将门创投 | MIT在读博士生金汶功:图表示学习在化学中的应用
Talk精华版 | CMU在读博士生辛书冕: Non-line-of-sight (NLOS) Imaging
Talk|清华大学交叉信息研究院薛峥嵘:ArrayBot - 让桌面成为机器人!
Talk | 杜克大学在读博士生李昂: 通信和计算效率联合优化的个性化联邦学习
MIT《工程师的数学方法 II 18.086 Mathematical Methods for Engineers II, Spring 2006》中英字幕
逛常熟昆承湖,路过莫文蔚母校,学生毕业不是哈佛就是MIT这种
Talk | ICLR'23 斯坦福大学计算机系博士后吴泰霖:学习可控的自适应多分辨率物理仿真
Talk预告 | CMU在读博士生侯一凡: Hybrid Servoing—抗扰动的机器人操作执行方法
本周Talk预告 | 阿里副总裁华先胜分享人工智能新基建; 东京大学在读博士石凡介绍空中机器人与灵巧操作
Talk | 清华大学交叉信息研究院助理教授许华哲:具身控制中的泛化能力
Talk精华版 | Caltech在读博士石冠亚: 深度学习与控制理论的可靠结合以及在机器人中的应用
MIT校长2024年毕业演讲:今天毕业的所有人都经过了考验!
Talk|卡内基梅隆大学李博文:适用于机器人的可泛化的目标感知
Talk精华版 | 清华大学电子工程系在读博士宁雪妃: 高效神经网络学习系统研究
Talk精华版 | 东京大学JSK实验室在读博士生石凡: 空中机器人与灵巧操作
Talk | 大连理工大学IIAU Lab在读博士生严彬:走向通用实例感知
Talk | 清华大学交叉信息研究院助理教授赵行:基于视觉感知的自动驾驶运动预测
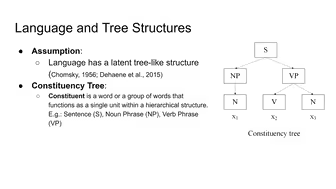
蒙特利尔大学在读博士-沈驿康:自然语言模型和无监督语法分析
Talk节选版 | MIT在读博士蔡涵:用于高效深度学习的硬件感知自动机器学习
直播回顾 | 清华叉院助理教授赵行、在读博士生孙桥:自动驾驶中的行为交互
Talk精华版 | Hawkes process模型新研究: 约翰霍普金斯大学在读博士梅洪源分享NeurIPS'20工作
Talk | 密歇根州立大学在读博士刘孝睿:通信高效的分布式机器学习
MIT量子物理Ⅲ《全100集》第48集
Talk | 斯坦福博士生黄文龙:利用基础模型推动机器人在开放世界中的泛化
国外主播:中国的一支机器人军队震惊了俄罗斯总统
Talk精华版 | MIT HAN Lab在读博士生唐昊天、刘志健: 高效、自动化的三维深度学习
Talk | 美国罗切斯特理工大学在读博士生包文韬:DEAR:面向开集动作识别的深度证据学习
Talk | 香港科技大学在读博士生柯磊:自动驾驶场景下的多目标追踪与实例分割
Talk | ICML'23 Oral 字节跳动 AI Lab 研究员郑在翔:人工智能如何助力蛋白质设计?
Talk节选版 | 加州理工学院在读博士石冠亚分享NeurIPS'20工作: 在线优化、控制和学习的结合
Talk | CMU博士胡亚飞 :基于离线强化学习的机器人自主探索
哈佛大学在读博士董鑫:模型量化—更小更快更强
Talk节选版 | 港科大在读博士周博宇: 空中机器人在未知环境中的快速自主探索