V
主页
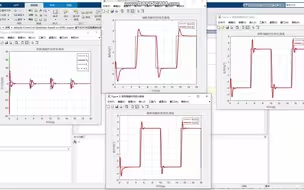
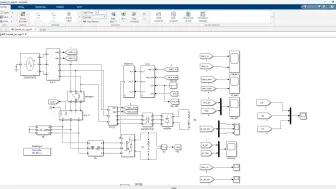
使用不同控制算法(LQR、滑模控制器、积分器反步控制器)的姿态确定和控制系统仿真matlab simulink
发布人
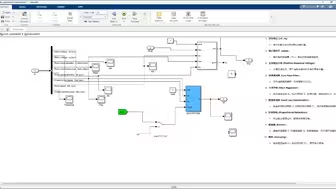
使用不同控制算法(LQR 滑模控制器 积分器反步控制器)姿态确定和控制系统仿真要查看此项目结果运行 plot_output.m 将输出每个控制器的平台方向角速度和反作用轮角速度图所有控制器的默认所需方向分别为 (80, 40, 60) 度(横滚俯仰偏航)用于这些控制器的参数是 Q = eye(6),对于 LQR,R = 10eye(3);K =0.3eye(3), G =0.1eye(3), SMC 的厚度 = 0.1;对于反步控制器,K1 = 0.001eye(3),K2 = 5eye(3)
打开封面
下载高清视频
观看高清视频
视频下载器
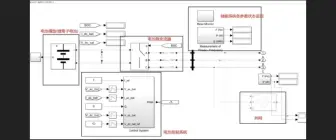
基于adrc的四旋翼姿态控制matlab代码simulink仿真
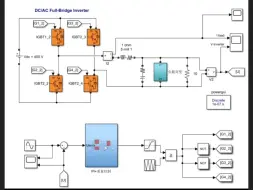
电力电子simulink仿真模型合集免费分享
基于MATLAB / Simulink的四轴飞行器动力学建模和仿真教学
电流滞环控制/matlab simulink
基于ip iq的电流滞环控制的有源电力滤波器(APF)matlab simulink仿真建模
电池充电放电控制器simulink仿真建模模型(DC总线PI控制器DC-DC转换器)matlab
MATLAB/Simulink中基于脉冲发生器的蓄电池充放电控制器
使用 MATLAB Simulink 分析 MOSFET、IGBT 和晶闸管的特性
SVC 详细仿真 Matlab Simulink 静止无功补偿器
倒立摆:Matlab 仿真 & 3D GUI(VRML)
两相混合式步进电机闭环驱动控制matlab simulink仿真
使用卡尔曼滤波器估算电池的充电状态SOC EKF simulink仿真模型
自主车辆建模.第2部分:在Simulink中使用自适应巡航控制模块
在 MATLAB Simulink 中模拟微电网(光伏太阳能、燃料电池和电池储能)
基于物联网的农村智能微电网系统matlab simulink仿真建模
MATLAB Simulink 中使用电压充电控制器设计和仿真
使用 MATLAB Simulink 对光伏 (PV) 电池进行数学建模
有个说法:“「递归」是检验编程天赋的试金石”;而本视频打破天赋壁垒,助你快速掌握递归。
使用 Battery Control MATLAB Simulink 对电池进行放电和充电电池管理系统锂离子电池放电充电的电池控制
滑动模式控制:抖动衰减和消除 滑模控制的 MATLAB 仿真
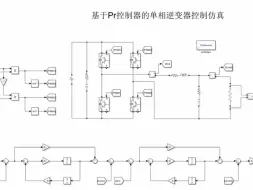
Matlab单相逆变器,基于pr控制
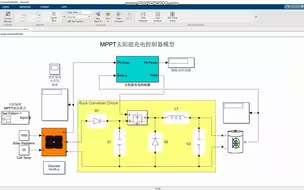
MPPT太阳能充电控制器模型matlab simulink仿真建模
基于PR控制器的交错BOOST-PFC变换器MATLAB仿真
光伏系统孤岛效应检测/matlab simulink
用ai下象棋,克制大爷不要不要的(后续)
有源功率因数校正simulink仿真建模包含一个级联数字控制器,用于通过升压转换器实现 pfc系列
电压源并网逆变器PQ控制 matlab simulink仿真
在 MATLAB Simulink 中使用恒流设计和仿真进行电池充电
Matlab PCA人脸识别算法仿真机器学习
基于PI+重复控制的单相全桥逆变LC离网仿真
维也纳整流器仿真simulink matlab仿真建模模型Vienna
单机无穷大系统低频震荡参数仿真avr pss
风储调频matlab/simulink 风储联合调频,风电储能参与系统一次调频。风机内部结构详细,仿真速度快,
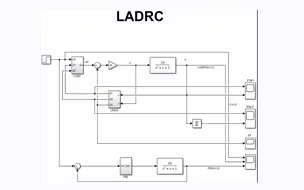
二阶线性自抗扰控制(LADRC)仿真
在 MATLAB Simulink 中使用直流电机进行风力涡轮机仿真
IEEE30节点电力系统参数及潮流计算算法matlab/牛拉法 pq分解
钟睒睒炮轰拼多多!对中国产业是一种巨大伤害
电力系统matlab simulink中过流继电保护故障分析
部分遮光条件下遗传算法的MPPT-PV simulink仿真MPPT PV by GA under partial shading conditions
通过 Simulink 和 MATLAB 中的仿真机械臂轨迹跟踪