V
主页
SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)
发布人
https://cv-xueba.club/ 北邮教授深入浅出三维视觉技术,涵盖摄像机标定、单视几何、双面立体视觉、三维重建、多视图几何、运动恢复结构SFM、SLAM等内容。全网质量最高!
打开封面
下载高清视频
观看高清视频
视频下载器
多视图几何-上 北邮教授深入浅出三维视觉技术(全网质量最高)
北邮教授深入浅出三维视觉技术(全网质量最高)
双目立体视觉 北邮教授深入浅出三维视觉技术(全网质量最高)
单视几何 北邮教授深入浅出三维视觉技术(全网质量最高)
运动恢复结结构 北邮教授深入浅出三维视觉技术(全网质量最高)
SLAM系统-下 北邮教授深入浅出三维视觉技术(全网质量最高)
三维点云PointPillars理论和代码实践
多视图几何-下 北邮教授深入浅出三维视觉技术(全网质量最高)
三维视觉技术--摄像机标定
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
[开源]迷你停车场车牌识别收费系统
矿洞扫描有难度?看赛尔S10如何轻松应对!
fastlio建图与自主导航演示
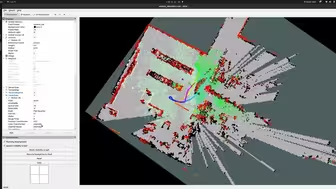
弱光环境下的SLAM系统
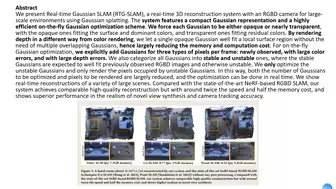
11月15日组会:RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
22年十佳开源SLAM算法
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
日本Slam残酷死核/残酷死亡金属乐队Hypergammaglobulinemia - 狂 (EP) 2024
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
无人作战平台发展如何?“心脏病”得以缓解,最重要的是人工智能 (1)
mujoco和Pinocchio人形机器人足底速度算法验证工具
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【CGSAI】SLAM Zero to One
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
马斯克特斯拉机器人的最新视频和技术解析
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
[IEEE TCSVT 2024]语义无关的动态SLAM
摇啊摇,跳啊跳,手持slam第一人称视角
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
北邮大一周日在校的一天干了啥🧐
机器人如何每日收割数百万英亩农田
【24北邮枫叶红全校首唱】因你而在
视觉SLAM进阶-从零开始手写VIO
OAK相机的SLAM建图
小小的调试一下
Catia三分钟一架飞行器
如何从手持SLAM数据到MESH网格
无人机SLAM入门教程(一):课程概述1.3 传感器简介
轮足机器人|平衡步兵动态障碍物导航避障
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】