V
主页
京东 11.11 红包
12.校准
发布人
描述 Industrial Robotics是一门工业机器人课程,由Udemy Academy出版。 了解工业人形机器人的工作原理。我们将从逐步构建其运动学模型开始,然后规划几何路径并优化运动路径。我们将学习如何正确测量电动机并了解伺服驱动器的确切调谐方法。我们将介绍机械臂、仪器和单元的校准方法,最后为您的仿真生成逼真的数字孪生。 学习内容 学习掌握工业机器人的所有理论和实践细节:求解运动学模型、规划几何路径和动态路径、调整运动控制系统、校准工具和单元。 我们专注于标准的人形机器人,因为它是业内
打开封面
下载高清视频
观看高清视频
视频下载器
unity的c#编程方法
121期新能源电池涂胶装配
全球工业机器人经典案例之36汽车零件焊接
13.模拟
全球工业机器人经典案例之30机器人点焊涂胶
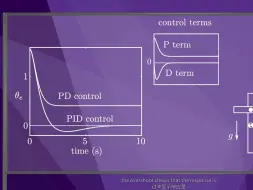
第11章-机器人控制-第2部分,共2部分
14.结论
236 如此高效的末端
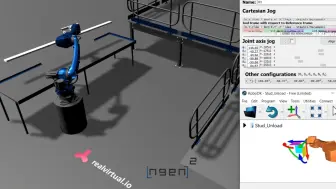
Unity 和 RoboDK 机器人逆运动学教程 - realvirtual.io
全球工业机器人经典案例之48车床全自动工作站
216 机器人校准
197 机器人末端吸盘工作原理
开源创客系列-经济实惠的DIY机器人手臂深入研究3D打印和伺服电机
3. cuML
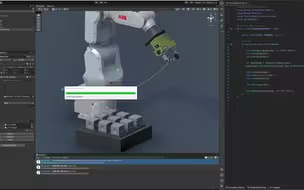
使用 Unity ML Agent 训练机器人手臂 _ Part1/5
工业机器人末端夹具系列
2.1、利用ROS2创建机器人
156你绝对没见过的机械臂
全球工业机器人经典案例12灌装产品码垛方案
全球工业机器人经典案例11智能仓储的码垛方案
8.笛卡尔机器人数字孪生
6.路径规划
154机器人装配工作站
工业机器人核心部件之摆线针轮减速机
6. 启用线轨机器人集成传感器和执行器与ROS2
第9章-轨迹生成-第2部分,共2部分
工业机器人核心部件RV减速机的工作原理
TM协作机器人教程9-先进的运动方法
8.基于RML的机器人拾取放置仿真
9.笛卡尔机器人真空拾取放置端部效应器
第3章-刚体运动-第2部分,共2部分
利用机器人完成移动、说话和等待等任务
全球工业机器人经典案例之37汽车配件焊接车间
盘点那些有趣的开源机械臂11
如何在欧姆龙LD移动机器人上设置无线
1.1. Introduction
1、工业机器人
史上最强离线编程
全球工业机器人经典案例之34SUV侧梁焊接产线
Unity 和 RoboDK 2 IK 机器人和夹具拾取和放置教程