V
主页
京东 11.11 红包
仅需两步完成ROS2 上Yolo的测试实验,兼容RK3588,Tensortr10.1, Onnxruntime
发布人
RK3558的操作指导看这里https://github.com/kaylorchen/rk3588-yolo-demo/blob/master/yolov8n-ros2.md QQ交流群:957577822 Up主只会在ubuntu2204上做开发,不会考虑兼容其他,合作除外。
打开封面
下载高清视频
观看高清视频
视频下载器
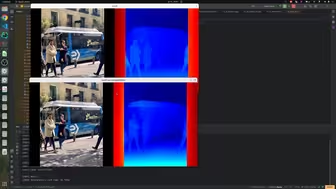
DepthAnythingv2单目深度估计DEMO演示 TensorRT RK3588 ONNXRuntime
RK3588 Yolov8官方模型转换-演示
RK3588 Yolov10 vs Yolov8 以及性能瓶颈分析
RK3588 Yolov8官方模型转换-onnx2rknn
RK3588 Yolov8官方模型转换 pt2onnx
AI推理框架, Yolov8 POSE同等条件比较Onnxruntime和TensorRT性能
RK3588 Yolov10 终于打败 Yolov8—— 针对上一个视频的模型的优化演示
RK3588 手把手run通义千问教程 2 升级驱动版本到0.9.6 香橙派5Plus自取内核安装包,其他板子参考github源码修改
ROS2 手把手教你制作deb软件包
RK3588 Yolov8模型转换,连板精度分析以及可能存在的bug
RK3588 阿里通义千问18亿参数大模型demo展示
ROS2最简工具包教程
RK3588 yolov8 seg demo 分割模型代码精讲 1 3588核心推理代码走读
ROS2 编写自己的的rosdep的yaml文件,解决rosdep找不到第三方库的问题
RK3588 Yolov8 bytetrack 目标跟踪Demo演示
RK3588 yolov8 seg demo 分割模型代码精讲 2 整体代码框架介绍
RK3588 手把手run通义千问教程 1 大模型转换为rkllm
RK3588 Yolov8 pose 一个唱跳rap打篮球的练习生
基于ROS2的树莓派自主定位与导航小车
RK3588 YoLov8输入层参数配置bug
RK3588 yolov8 seg demo 分割模型代码精讲 3 后处理精讲
RK3588 手把手run通义千问教程 3 Demo代码的编译和简单的讲解
RK3588 yolov8多输出改动 官方demo的输出头改动部分代码分析
RK3588 yolov8 多线程推理, 1080p视频文件推理高达85帧
RK3588 Yolov8 OBB定向边框检测Demo演示 也许可能是3588的OBB模型首发
使用urdf在ROS2中构建四足机器人的Gazebo和Mujoco仿真
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
使用ROS2 Control来控制四足机器人
ROS2系列教程-〖基础篇7〗: Navigation2实战基础demo
在ubuntu 2004(focal)上使用apt安装ros2 humble,不需要源码编译!!!支持X86和ARM64
docker qemu编译环境和纯粹交叉编译环境对比
使用ROS2-Control + OCS2来控制四足机器人
无人机对地目标识别与跟踪
RK3588 智障大模型demo演示 gemma-2b-it internlm2-chat-1_8b MiniCPM-2B-sft-bf16 TinyLlama
如何用java做人工智能目标识别DJL+YOLO(一)Yolo开发环境搭建与脚本导出
我自制了一款解除任何限制的ai聊天,可用Claude3.5,可自定义角色
《ROS 2机器人开发从入门到实践》6.2.2 在RViz中显示机器人
EasyAI智能监控系列-Rk3588-YOLOV8
《ROS 2机器人开发从入门到实践》5.4.2 数据化可视工具Rviz
高效率的ARM64交叉编译环境配置-非docker