V
主页
京东 11.11 红包
【轨迹跟踪】基于maytlab拓展卡尔曼滤波时序四旋翼无人机状态跟踪【含Matlab源码 2246期】
发布人
【轨迹跟踪】基于maytlab拓展卡尔曼滤波时序四旋翼无人机状态跟踪【含Matlab源码 2246期】 (1)如需代码 可扫描视频里QQ二维码; (2)代码运行版本 Matlab 2019b或2014a (3)其他仿真咨询 1 期刊或参考文献复现; 2 Matlab程序定制; 3 科研合作;
打开封面
下载高清视频
观看高清视频
视频下载器
【机器人控制】基于matlab受章鱼启发的连续机器人轨迹跟踪控制【含Matlab源码 7217期】
【四旋翼】基于matlab四旋翼飞行器仿真【含Matlab源码 7367期】
【路径规划】基于matlab RRT路径规划最短路径、不确定性最小的路径和不确定性最大的路径(卡尔曼滤波器来跟踪不确定性)【含Matlab源码 6841期】
【误码率仿真】基于matlab 2x2MIMO和ZF均衡器(瑞利信道) BPSK调制误码率仿真【含Matlab源码 7443期】
【滤波跟踪】基于matlab变分贝叶斯的自适应卡尔曼滤波【含Matlab源码 8976期】
【数字信号去噪】基于matlab灰狼算法优化VMD数字信号去噪(目标函数:包络信息熵 包络熵 排列熵 样本熵最小)【含Matlab源码 6858期】
【轨迹跟踪】基于matlab MPC Segway式机器人平台轨迹跟踪(含角度 输出)【含Matlab源码 7218期】
【WSN路由】基于matlab模拟比较无线网络中最短单路径 (Djikstra)路由和任意路径路由【含Matlab源码 7342期】
【目标跟踪】基于matlab多目标跟踪两个传感器之间信号到达时间差【含Matlab源码 6827期】
【数字信号去噪】基于matlab带遗忘因子的离散卡尔曼滤波器数字信号去噪【含Matlab源码 7411期】
【误码率仿真】基于matlab阿拉姆提空间时间块编码STBC(含误码率)【含Matlab源码 7425期】
【水箱】基于matlab粒子滤波器跟踪三罐互联水箱系统状态(确定泄漏发生的时间)【含Matlab源码 7216期】
【四旋翼】基于matlab四旋翼飞行器最小捕捉轨迹生成与控制【含Matlab源码 7365期】
【四旋翼】基于matlab simulink四旋翼无人机与移动平台交会的运动控制与仿真【含Matlab源码 7491期】
【电力仿真】基于matlab并行共振并行RLC电路及其特性【含Matlab源码 7427期】
【图像边缘检测】基于matlab CT图像边缘检测梯度分析【含Matlab源码 7232期】
【 UWB定位】基于matlab扩展卡尔曼滤波器EKF+无迹卡尔曼滤波器 UKF+泰勒级数的位置估计+三边测量法和多边测量法【含Matlab源码 7363期】
【四旋翼】基于matlab四轴飞行器旋转系统设计MPC控制器【含Matlab源码 7503期】
【机械手】基于matlab 6DOF机械手轨迹规划【含Matlab源码 7494期】
【TWVRP】基于matlab花朵授粉算法FPA求解带时间窗的骑手外卖配送路径规划问题(目标函数:最优路径成本 含服务客户数量 服务时间 载量 路径长度)【含M
【验证码识别】基于matlab机器视觉数字验证码识别【含Matlab源码 7469期】
【滚动轴承故障状态识别】基于matlab SVM滚动轴承故障状态识别(含准确率)【含Matlab源码 7458期】
【信息融合】基于matlab IMM_MSPDA关联算法多传感器多目标数据融合【含Matlab源码 4520期】
【TWVRP】基于matlab白鲸算法BWO求解带时间窗的车辆路径问题(目标函数:最短距离)【含Matlab源码 5032期】
【无人机控制】基于matlab反步法的无人机四旋翼滑模控制【含Matlab源码 6798期】
【天线】基于matlab非树空间偶极子天线三维FDTD模拟【含Matlab源码 7433期】
【TWVRP】基于matlab金豺算GJO求解带时间窗的骑手外卖配送路径规划问题(目标函数:最优路径成本 含服务客户数量 服务时间 载量 路径长度)【含Matl
【机械手控制】基于matlab 4-RPR平面机械手的可操作性、工作空间分析和路径跟踪【含Matlab源码 7422期】
【信道容量】基于matlab OAM涡旋电磁波通信系统容量仿真【含Matlab源码 7509期】
【雷达跟踪】基于matlab卡尔曼滤波器雷达多目标跟踪(双雷达 四目标 分布式融合)【含Matlab源码 6826期】
【气动学】基于matlab卡尔曼滤波器和红外传感器导弹制导仿真(含导弹位置和速度)【含Matlab源码 6838期】
【序列检测】基于matlab GMSK最大似然序列检测【含Matlab源码 7426期】
【水下航行器】基于matlab水下航行器能量收集器动力学与控制【含Matlab源码 7378期】
【船舶控制】基于matlab simulink无人水面艇控制轨迹航行【含Matlab源码 7483期】
【图像去噪】基于matlab深度学习(卷积神经网络CNN)彩色图片去噪 【含Matlab源码 6823期】
【图像拼接】基于matlab Harris角点检测和HOG算法等计算机视觉算法多幅图像拼接【含Matlab源码 7325期】
【MPC】基于matlab多变量状态空间MPC【含Matlab源码 7419期】
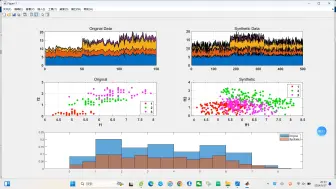
【数据生成】基于matlab SNN浅层神经网络数据生成【含Matlab源码 7371期】
【信道估计】基于matlab LMS自适应滤波盲信道估计(调制方式QPSK)【含Matlab源码 7445期】
【参数辨识】基于matlab EM算法求解具有两个状态的高斯混合物参数估计优化问题【含Matlab源码 6763期】