V
主页
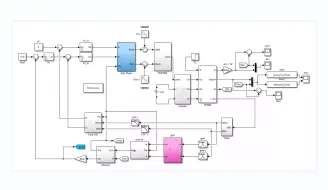
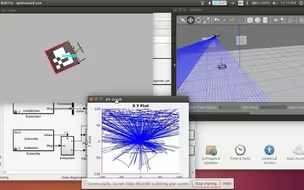
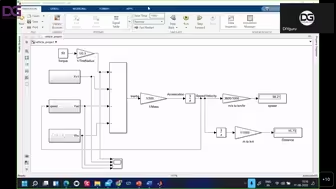
使用基于视觉的控制的动态路径跟随机器人
发布人
该项目探索制作一个无线自动引导机器人 (AVG),除了安装一个高架摄像头外,它不需要对环境进行任何类型的侵入性修改。一个四轮差速驱动机器人已被无线控制,以在 1.8m x 1.4m 的工作空间内跟随图形用户界面上绘制的路径。机器人通过来自摄像头的视觉反馈纠正其方向来控制。执行误差分析以研究机器人遵循所绘制路径的程度。机器人的估计误差在路径的几厘米以内,可以通过修改各种阈值来减小
打开封面
下载高清视频
观看高清视频
视频下载器
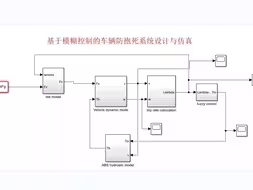
基于模糊控制的车辆防抱死控制系统/simulink
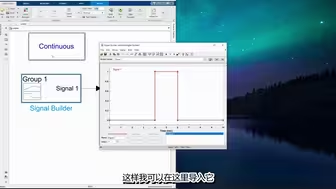
使用Signal Builder将Excel文件导入MATLAB Simulink
利用SVPWM对感应电机进行速度控制的MATLAB仿真 标量控制 Vf控制
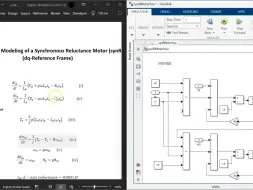
MATLAB SIMULINK同步磁阻电动机的建模与仿真
基于MATLAB 和Simulink 的飞行控制系统 在 FlightGear 上模拟
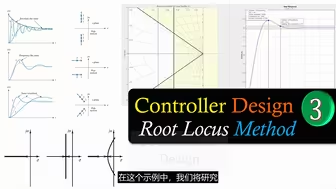
根轨迹设计方法| PID控制器设计| MATLAB
基于MATLABSIMULINK的电池管理
根轨迹设计方法PI控制器设计 MATLAB
电池管理系统BMS风扇和散热器冷却电动汽车电池MATLABSIMULINK和SIMSCAPE
基于永磁同步电机旋转高频信号注入法零低速无位置控制仿真matlab
在 MATLAB 中使用控制器进行无人机视觉悬停 Gazebo 仿真
基于MATLAB SIMULINK的电池管理系统BMS热管理
模糊PI的永磁同步电机双闭环控制/matlab simulink
使用 matlab simulink 对 ABS 系统进行仿真
感应电机等效电路参数| 直流、空载和堵转测试
基于MATLAB的卡尔曼滤波传感器融合
化身智能机器人了!一切从我倔强画圆开始吧!
根轨迹设计方法| P控制器设计| 计算和 MATLAB仿真
三相异步电动机的MATLAB SIMULINK数学建模与仿真
二自由度PID控制器设计计算MATLAB
永磁同步电机HFI无速度传感器SIMULINK仿真/matlab
无刷直流电机的速度控制电流控制器matlab simulink仿真建模模型bldc
感应电动机简单直流制动仿真/matlab simulink
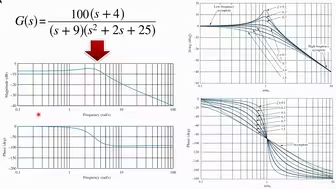
从传递函数三阶系统实零复极点绘制bode图示例2/matlab
电动汽车动力总成建模与仿真|动力总成工程matlab /simulink
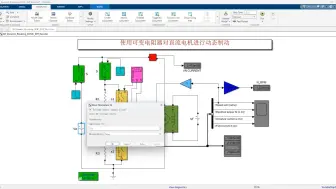
使用可变电阻器对直流电机进行简单动态制动/matlab simulink
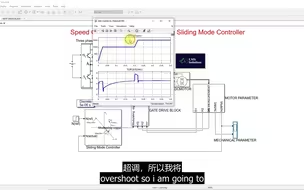
基于滑模控制的无刷直流电机速度控制/matlab
使用 FlightGear 可视化 Simulink 飞机模型的状态
道路车辆制动至停止的动画,带有位置、速度、加速度和制动力图matlab算法
从电机转矩计算车速的Simulink模型matlab
MATLAB SIMULINK三相异步电动机IM的数学建模与仿真
使用 MATLAB 简化 3D 动画 - 可视化飞行测试数据和仿真结果
电励磁同步电机的启动、运行、能耗制动过程的仿真
自动电动汽车的再生制动matlab/simulink
倪师讲血管健康,血管堵塞怎么办?
基于动态车辆模型的 Baidu Apollo lqr和mpc横向控制算法
如何开始使用 ROS 编程无人机
Arduino 的 Matlab 实时数据采集和绘图:振动传感器
三相逆变器的有功和无功功率控制MATLAB SIMULINK模型仿真
使用Solidworks的无人机(四旋翼机)第1部分