V
主页
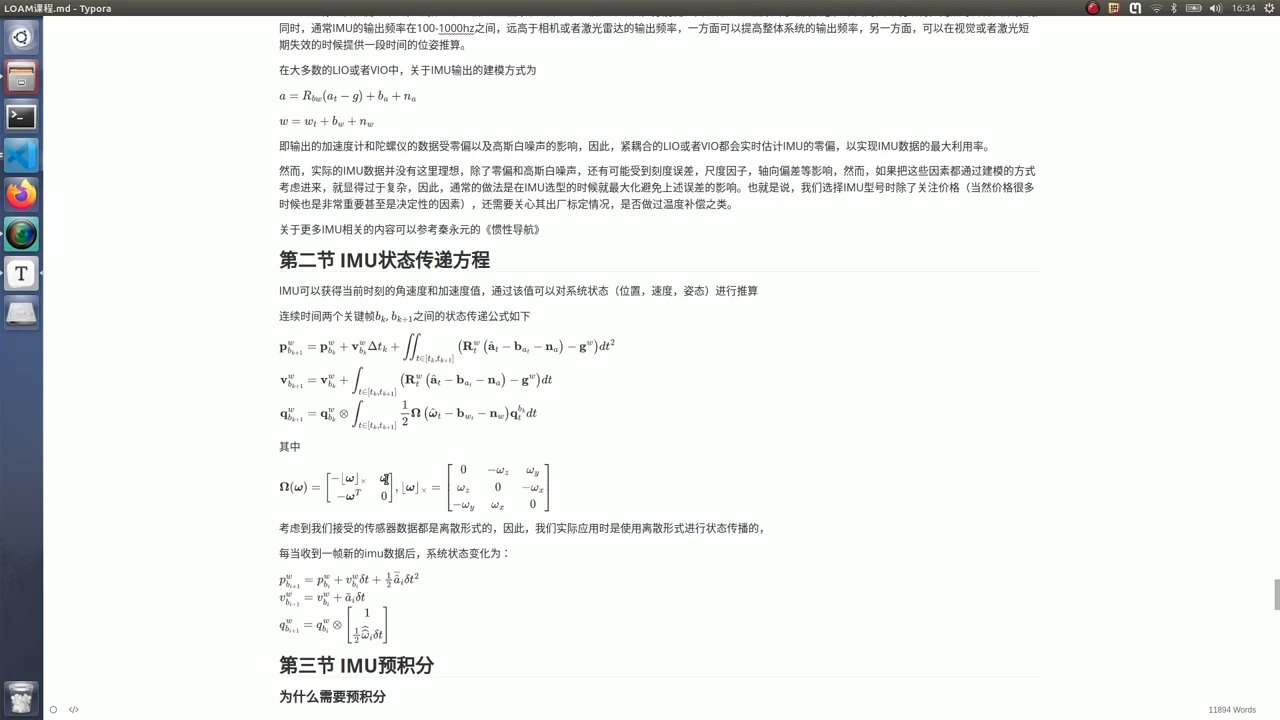
6.IMU状态传递方程
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
13.位姿融合输出
5.IMU器件介绍及选型建议
9.IMU标定方法简介
16.点云配准
7.IMU预积分简介
ceres-solver简介
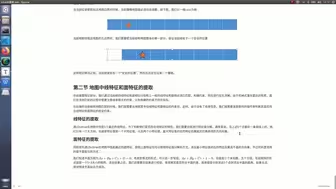
18.基于栅格的局部地图构建
10.因子图优化及GTSAM库介绍
激光雷达畸变及运动补偿
15.初值计算及局部地图构建
8.预积分在优化问题中的建模
11.GTSAM关于预积分接口介绍
17.回环检测及位姿计算
帧间里程计运动估计
8.两部优化的帧间里程计
A-LOAM运行示例及可视化分析
4.LIO-SAM运行示例
6.广度优先遍历算法介绍
多传感器融合算法落地改进建议
多线激光雷达性质
A-LOAM编译及安装
5.地面点分离方法
19.地图中线面特征的提取
特征提取及均匀化
20.构建优化问题求解位姿
1.LeGO-LOAM框架简介
7.基于BFS的点云聚类和外点剔除
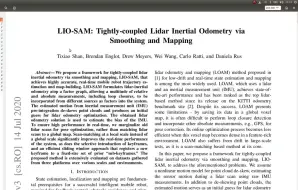
LIO-SAM论文带读
FAST-LIOdemo讲解
3.LIO-SAM编译安装
ROS及坐标系介绍
A-LOAM简介
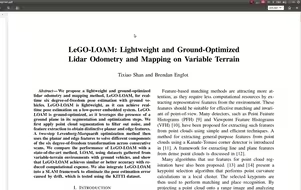
LeGO-LOAM论文详细解读
激光雷达SLAM不同算法的对比
22.地图更新方法
12.基于IMU预积分的前端代码讲解
3.LeGO-LOAM代码编译安装及常见问题解决
14.异常点筛除机制
18.后端里程计、回环、GPS融合
4.代码运行示例及可视化分析