V
主页
京东 11.11 红包
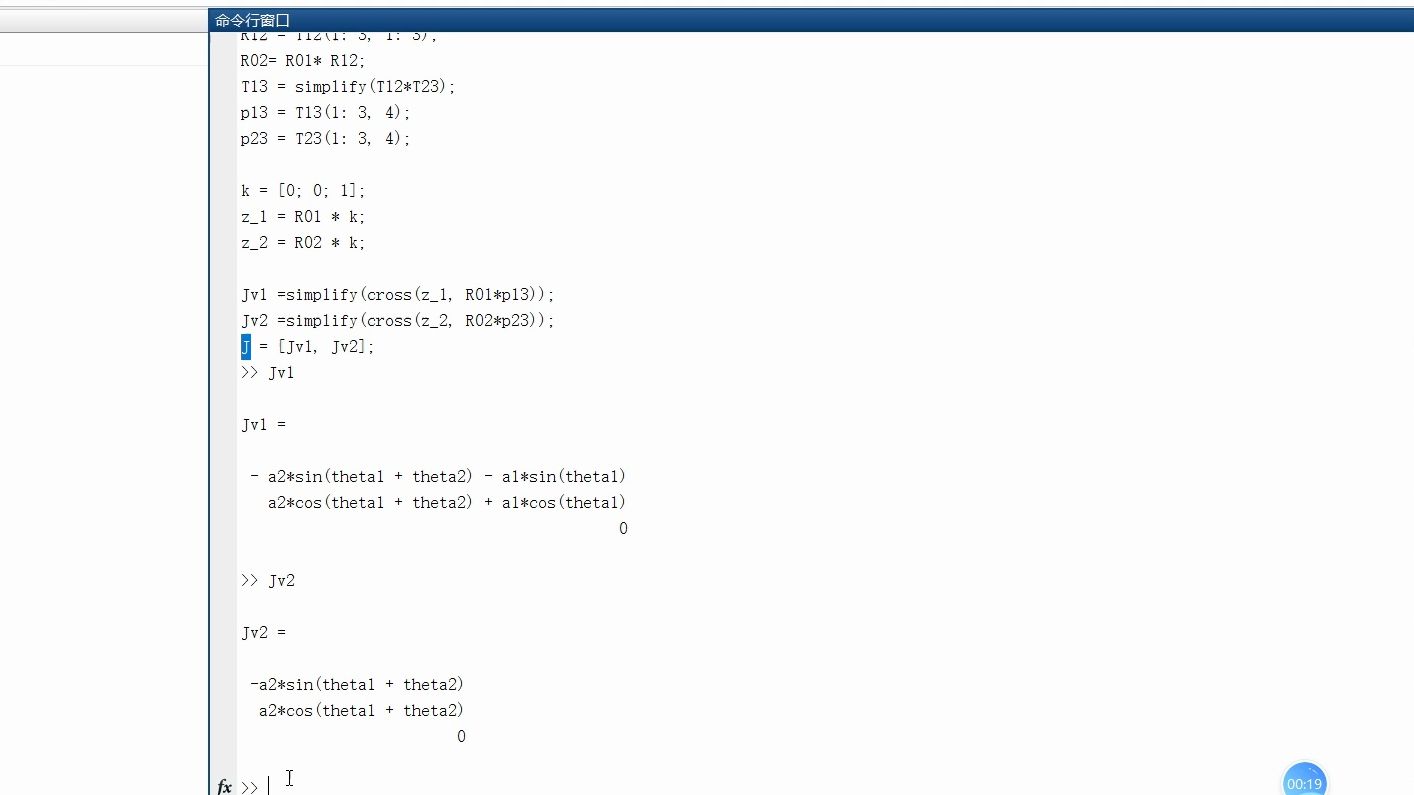
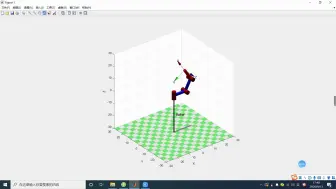
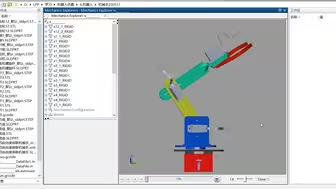
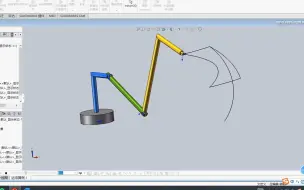
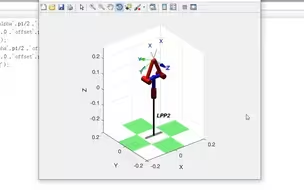
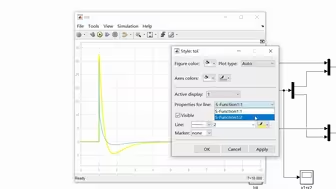
matlab演示(3)-双连杆机械手的速度雅可比矩阵
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
挑战全网!自制一只机械手
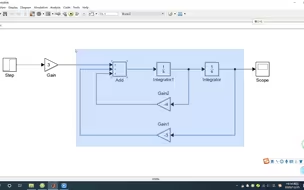
simulink演示(2)-双关节机械手PD控制
MATLAB-robotic仿真(7)-SCARA机械手
MATLAB演示(2)--delta机械手轨迹规划
一个爱用吸管喝水的女生轻轻的碎了
simulink仿真演示(1)-delta机械手
stm32+uno 大二毕设机械手 你想要一只真正的机械手吗?少年 肌电信号检测 舵机驱动
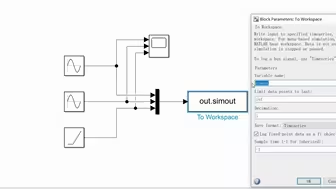
simulink教程(22)-simulink数据导入matlab
“探索未来!智能工具设计”
matlab--动画演示(2)--做仰卧起坐的小机械臂
开源超低成本谐波减速,文件分享在评论区。
simulink教程( 2)--subsystem
solid演示(4)--机械爪
Hybrid IK——Unity中反向动力学插件
M5Stack 2024年日本创意大赛第一名:智能机械手
solid演示(32)--发条齿轮小盒
simulink演示(4)-fuzzy工具箱
solidworks演示(40)-单摆这么简单的
solid演示(38)-delta机构运动
simulimk教程(12)--solidworks机械手导入matlab
带触觉的灵巧手 #SeedRobotics #IROS2024
3D打印(1)--打印曲柄摇杆机构
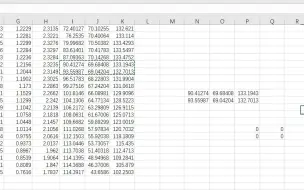
solid周边(1)--excel公式数值粘贴
simulink教程(4)--利用gain实现向量和矩阵乘法
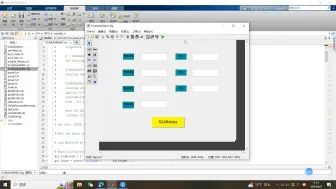
matlab-最基础的gui--机械手正解(8)
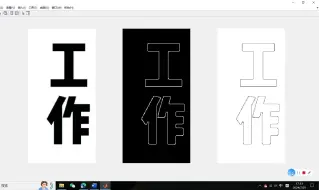
matlab 演示(4)-提取图片中文字边缘
solid运动演示(31)--机械手绘制轨迹
robotics仿真(6)-同时显示两个机械手
solidworks演示(15)-装配投石车
solidworks教程(10)--正垂面切割圆筒
solid教程(27)-插入角度基准面
超低成本自制谐波减速,S型齿,精度测试。
solidworks演示(16)--秦弓弩装配
solid演示(33)-机械蝴蝶机构运动简图
solidworks--运动演示(2)--曲柄滑块机构
工业机械手臂,智能码垛机器人,码垛机械手,工业机器人,工厂自动化。
研一研二实用【Matlab论文复现】,原文解读+代码复现+手推公式,一小时快速掌握!!!(matlab机器学习/matlab神经网络/人工智能)
Blender制作的灵活的机械手
机械手快完善了,该是时候搞别的东西啦
simulink教程(20)-修改scope模块