V
主页
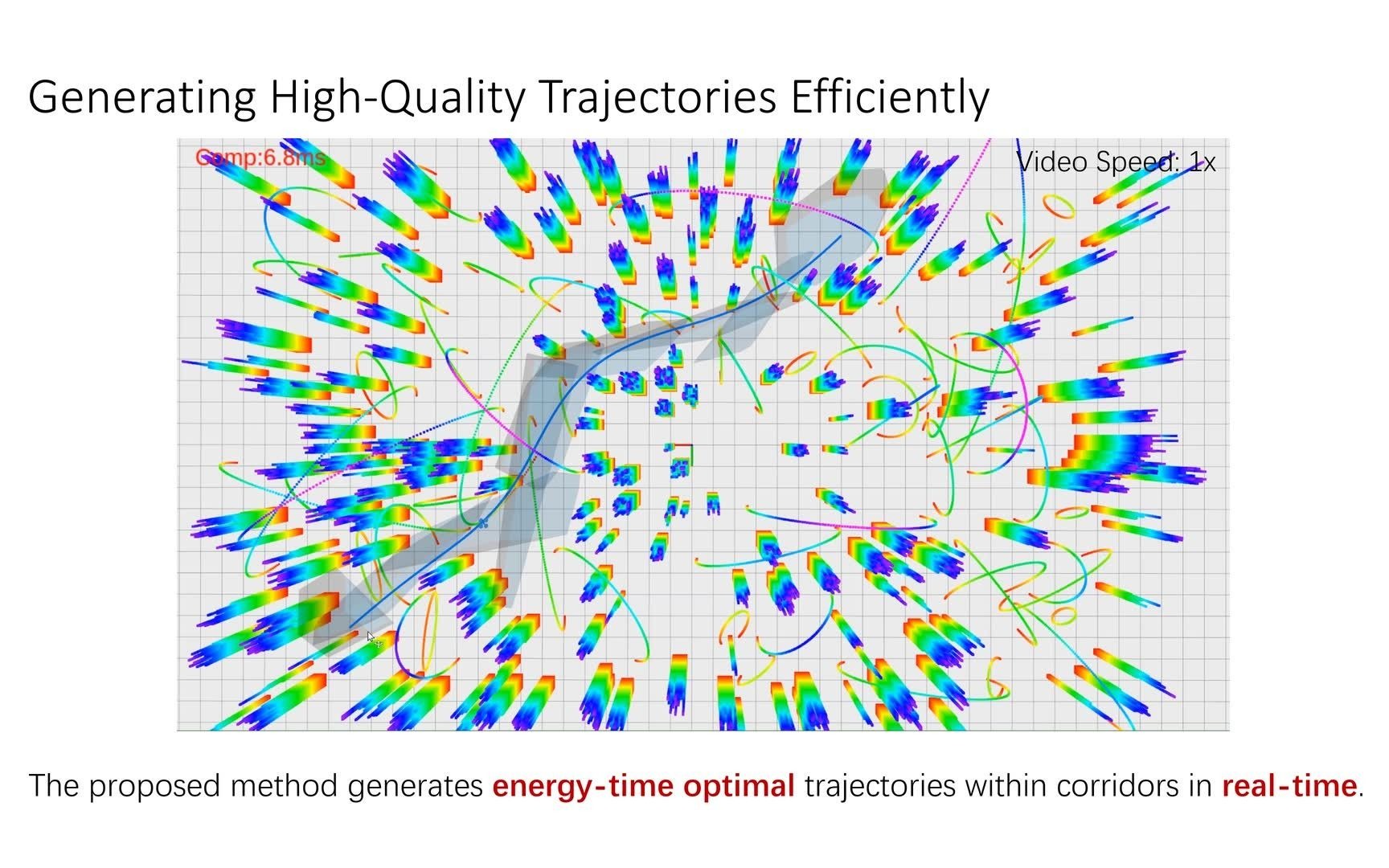
Generating Large-Scale Trajectories Efficiently using Double Description
发布人
Video for the ICRA 2021 submission. Generating Large-Scale Trajectories Efficiently using Double Descriptions of Polynomials.
打开封面
下载高清视频
观看高清视频
视频下载器
Fast-Tracker 2.0
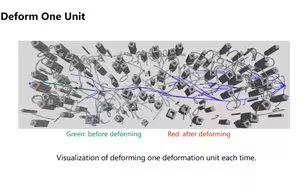
STD-Trees: Spatio-temporal Deformable Trees for Multirotors Kinodynamic Planning
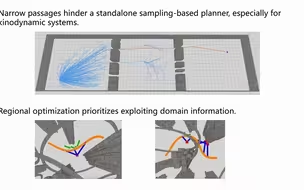
Efficient Kino-Planning with Regional Optimization and Bidirectional Search
Sparse-Graph-Enabled Formation Planning for Large-Scale Aerial Swarms
Integrating Fast Regional Optimization into Sampling-based Kinodynamic Planning
Xsense离职大佬意外泄漏了公司IMU核心算法代码,这个瓜有点大,快来看看代码吧
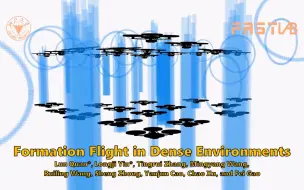
复杂环境下的编队飞行 (Formation Flight in Dense Environments)
Towards Efficient Trajectory Generation for Ground Robots beyond 2D Environment
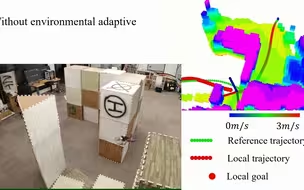
EVA-Planner: Environmental Adaptive Quadrotor Planning
Distributed Swarm Trajectory Optimization for Formation Flight in Dense
Alternating Minimization Based Trajectory Generation For Quadrotor Aggressive Fl
An Efficient Topology Guided Kinodynamic Planner for Autonomous Quadrotor
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors
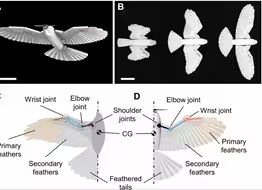
[Science Robotics]鸟类启发的无人机转弯动作中的尾部扭转 | 2024 洛桑联邦理工学院
Meeting-Merging-Mission: A Multi-robot Coordinate Framework for Exploration
浙大Science Robotics封面 全自主微型飞行机器人集群
Mapless-Planner: A Robust and Fast Planning Framework without Map Fusion
EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System
A Linear and Exact Algorithm for Whole-Body Collision Evaluation via Scale Op...
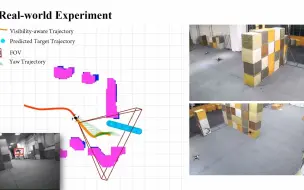
Visibility-aware Trajectory Optimization with Application to Aerial Tracking
吊载无人机系统的灵巧运动规划与控制(Impact-Aware Planning and Control)
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Compl
Elastic Tracker: A Spatio-temporal Planner for Flexible Aerial Tracking
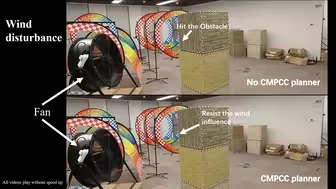
CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Flight
FAST-Dynamic-Vision: Detection and Tracking Dynamic Objects with Event and Depth
Autonomous Drone Race, 自动无人机竞速
Robust Trajectory Planning for Spatial-Temporal Multi-Drone Coordination
VID-Fusion: Robust Visual-Inertial-Dynamics Odometry
无人机跟踪与飞落 (Adaptive Tracking and Perching for Quadrotor in Dynamic Scenarios)
Skywalker: a Compact and Agile Air-Ground Omnidirectional Vehicle
Gaussian-Splatting-based Active Reconstruction
人 工 智 能
Star-Convex Constrained Optimization for Visibility Planning
Learning-based 3D Occupancy Prediction for Navigation in Occluded Environments
An Efficient Trajectory Planner for Car-like Robots on Uneven Terrain
Continuous Implicit SDF Based Any-shape Robot Trajectory Optimization
The Visual-Inertial-Dynamical UAV Dataset
浙江大学 FAST-Lab FAR 课题组2023代表性研究成果|无人机|人工智能|集群机器人|自主导航
GPA-Teleoperation: Gaze Enhanced Safe Assistive Aerial Teleoperation
Prim-Planner: An Ultra Lightweight Quadrotor Planner with Time-optimal Primitive