V
主页
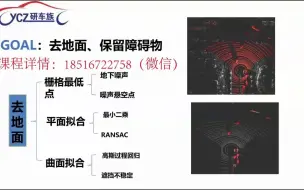
点云感知的框架及检测流程
发布人
老师介绍: 小鱼老师,毕业于某C9高校,硕士学历,雷达算法五年从业经验,现在某自动驾驶科技公司任高级雷达算法工程师。 课程介绍: 全面讲解基于激光雷达的感知技术,从传统算法到深度学习,从检测算法到障碍物追踪,从数学推导到代码实践,全方位讲解雷达感知技术。 雷达感知知识系统覆盖,理论与代码实践相结合,并有大量的工程实践问题可提供练习,并传授工程处理经验。 职业目标:完成集训可从事雷达算法工程师、雷达研发工程师等相关岗位,打破传统开发程序员的技术瓶颈,待遇优厚。
打开封面
下载高清视频
观看高清视频
视频下载器
传统检测算法介绍及追踪算法梳理
深度学习检测算法介绍
ADAS辅助驾驶工程师岗位解读
汽车电子系统架构介绍,车载测试/汽车电子测试/自动驾驶adas测试。
Cyclone 9.2 激光雷达点云处理
对比特斯拉FSD,乾崑ADS 3.0的优势是什么?靳玉志:带激光雷达的乾崑ADS 3.0感知上限更高,意味着更安全。
车载测试工程师的基本素养/智能座舱测试工程师/自动驾驶测试工程师
Bentley Pointools View一款不可多得却又免费的激光雷达点云-三维模型-标注信息-空间距离/坐标查询软件工具!
今天我们用GS100G激光雷达对公司楼道进行点云数据采集
大疆禅思 L2 产品小课堂(3) - 点云数据处理
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
自动驾驶工程师岗位解读
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
自动驾驶/ADAS功能算法开/仿真/测试工程师培训V:yanchezu,碰撞概率代码讲解
自动驾驶/ADAS功能算法开/仿真/测试工程师培训,aeb 碰撞分析算法及产品架构讲解(1)V:yanchezu
自动驾驶/ADAS功能算法开/仿真/测试工程师培训EuNCAP2020_AEB_Ftap_车辆横穿环境调试和使用
华南理工大学车辆工程硕士,在大厂工作的薪资情况。
自动驾驶/ADAS功能算法开/仿真/测试工程师培训V:yanchezu
加速道路资产盘点,灵光Lixel助力交通管理智能化| 手持激光雷达
无人机航测三维建模外业操作,大疆L2点云外业,三维模型,激光雷达点云,测量佬
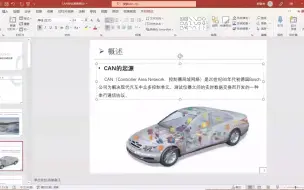
CAN协议基础培训/车载测试基础/智能座舱测试工程师
满分旗舰!复合型导航机器人强势登场,室内外建图与导航定位专家!
FPGA实现固态激光雷达,据说这个玩透年薪百万
激光雷达路线再否定!用最简单逻辑解释,无需因华为就认为方向正确
试驾昊铂HT 24款激光雷达版,整体基本上可以实现A点到B点自动驾驶通行了,但路况复杂的路段仍要手工接管,否则通勤效率会降低
揭秘最新LiDAR神器!2D雷达也能获取三维数据~
危险!我开了1400公里亲身实测小米SU7Max高速NOA【新评科技】
还有比我更清晰的大屏SR嘛?
纯视觉系统和激光雷达哪个好?迪哥精讲基于纯视觉系统的无人驾驶算法,论文解读+项目实战
自动驾驶/ADAS功能算法开/仿真/测试工程师培训V:yanchezu,碰撞分析数学建模
6000公里长测~潮玩方盒Icar03叫你好看!
iPad Pro激光雷达扫描三维建模一只fufu! M4芯片真的太强了!
6000公里长测
东华大学机械硕士,在企业工作的薪资情况。
智驾变道这么猛
灵光Lixel L2,助力全球最长在建海底公路隧道项目
3d打印 2轴俯仰台 低精度 更低成本
XOS5.1.5版本下,开着小鹏G6的XNGP在重庆网红李子坝遛弯是什么体验?是“绕来绕去”的体验!
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
在重庆渝中区用智驾,还得靠这种贴身肉搏的绕行;一起看看XOS5.1.5版本下的几个亮点表现,XNGP能力正在快速迭代中~