V
主页
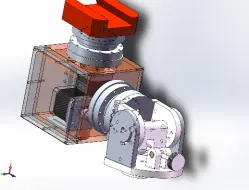
赤道仪和导星控制系统全自制,一切从零开始,不使用任何现成控制软件和模块,这一年的制造过程辛苦但结果不差,学到了很多!
发布人
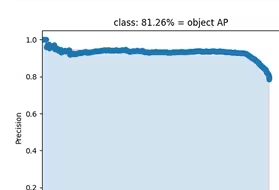
经过了一年时间的设计及算法编写,以及这个寒假做的算法代码测试与改进,我认为这个赤道仪的性能已经达到我能做到的极限了。在赤道仪机械部分,在赤经轴使用了来自中国聚隆的型号为HF20-2的谐波减速器,在赤纬轴使用了一个在咸鱼买的日本新宝70型谐波减速器,两个轴均使用同步带+42步进电机驱动;在下方极轴电调机构部分,在极轴俯仰角调节处使用了蜗轮蜗杆传动结构,在极轴东西向调节处使用了行星减速器+外齿轮传动,由于减速比足够,每个轴的电机分辨率都小于了0.1″(0.1/3600度)。在赤道仪控制部分,并没有使用大家熟知的onstep模块,而是利用STM32自己编写了赤道仪的控制程序,通过单片机定时器输出PWM波形控制步进电机运行,利用串口中断方式,和上位机(我的拯救者2021R7000p)使用USB连接,自己定义了通信协议(既单片机接收的信号和上位机的约定),可以将精确到1/60″(1/60/3600度)的角度信号、8种运动模式信号(盲跟,赤经轴停止,赤经纬轴自动寻星调整,赤经炜轴导星调整,极轴调整)发送给单片机进行处理。在上位机底层算法部分,主要完成了如下工作:1.星点提取,从导星相机拍摄的图像中将星点提取出来,这里每个星点用C++语言描述为了一个星点类(class)其中的成员包括星点中心坐标位置、星点大小、平均灰度等,该函数输入OPENCV的Mat类,输出我自己定义的星点数组类。2.星点定心,这一小步主要工作是将只包含一个星点的小图像中的星点中心确定下来,当然方法很多,这里主要利用了质心法和高斯拟合法。3.星点跟踪,这一步的工作是确定两张图像中的对应星点,进而算出两张图像的像素单位的偏移,这里的算法主要是基于几何特征,因此一次可以计算很多星点,这样该算法就不同于phd只寻找一个星点,当然具体好不好我就不管了吧4.一些数学算法类,我利用C++封装了一些类从而便于书写程序,其中包括了:离散傅里叶变换器(用于分析导星误差以及给出周期误差预测)、随机抽样一致性算法圆拟合类(用于对极轴)、模糊pid控制器(用于导星控制)上位机实际执行的函数主要是以下这些:1.极轴校准,由于自制的赤道仪没有给极轴镜留位置,因此这里我利用导星镜对极轴,极轴校准的步骤是,1,将导星镜调整到与赤道仪极轴同轴,这一步就需要赤经轴转起来,观测北极星在导星镜图像里面划过的轨迹,利用算法拟合这个轨迹得到一个圆,这个圆的中心就是赤道仪极轴在导星镜图像中的位置,第二步,将北极星移到这个圆心的位置,这样就将赤道仪极轴指向了北极星,第三部,利用当地恒星时得到北极星的位置,极轴下面两个调整电机运行规定的角度将极轴放置于北天极2.自动寻星,自动寻星算法也是自己写的,即首先将所有星星坐标输入程序,计算赤道仪该运行多少度,将度数发到赤道仪,当然说起来简单,但是也得考虑很多问题,第一,赤道仪不能打到脚架,这就要求赤纬大半圆的位置要根据星点位置而变化,要使得赤道仪赤纬大半圆不能经过中天(因为赤纬轴坐标覆盖率180度而赤道仪的赤纬轴可以转360度),第二,需要进行校准,得到赤道仪的角度误差曲线,这里使用的是最小二乘法拟合,可以进行大于等于3的任意星校准。3.导星,上述很多数学class都是为了导星服务的,导星算法大致分为这几步,第一步,测量赤经轴、赤纬轴的运行方向向量,因为我的导星相机位置每次都是现安装的,每次的位置都不一样,因此每次两个轴运行在图像上造成的星点偏移方向都不一样,第二步,测量角度传递系数,这个名字是我起的,意义是将图像中星点偏移的像素值换算为赤道仪运行的角度值需要乘以的常数,第三步,进入导星死循环,在进循环之前首先录入一个初始图像并提取星点,在循环中持续读导星镜的实时图像,利用跟踪函数计算这一时刻和初始图像的偏移,转换为赤道仪运行的角度,发送给赤道仪。在导星中有很多小tips如下:第一,这个导星算法其实是一个pid控制算法,因此给到赤道仪的角度并非是1:1的图像偏移第二,导星中使用了三角函数拟合,在前150次时持续输入误差数据,在150次之后拟合周期误差基波,在之后的时间里加入傅里叶周期预测。第三,导星并非一直使用同一个初始图像,当偏移超过阈值的次数超过规定次数时就将这一实时的星点作为初始位置,第四,导星是运行在两个线程的。一些结果:1.导星误差,在没有加入傅里叶变换时导星误差最大4角秒,均值0.25角秒,加入傅里叶变换预测后最大误差降低到2角秒,均值几乎不变(注意这里的角秒是赤道仪运行的角度即2/3600度,不知道和爱好者口中的误差是不是一个东西,但是单位是一样的)2.造价,因为走了很多弯路,因此造价来到了8500元3.耗时,赤道仪的机械设计花了五个月,期间还被有个淘宝老板鸽了,算法程序设计用了七个月,使用的是C和C++语言,写了15000行代码,利用了OPENCV进行图像识别。
打开封面
下载高清视频
观看高清视频
视频下载器
自制谐波赤道仪控制系统完工!
因临时号码牌识别不方便,女司机DIY纸质放大版号牌,交警:不违法但不提倡
超能力之服从手套帮助男子报复美女上司
女子因临时号牌识别不方便,DIY了一张纸质“放大号牌”上路行驶,交警:不违法但不提倡
谐波赤道仪你还在买吗?自己做快乐来的更简单!
学妹炼的目标检测,这下压力给到控制了
小爱同学权限真的高,几乎可以控制车内的一切!
五年,最终还是做了
啊?你用天文望远镜拍coser?!
最新模型GPT4o永久免费使用攻略
难道你们不会续梦控制梦境吗?
谐波赤道仪组装过程
兄弟们,为什么我拼出来的不一样啊?
十几块钱就能做远程开关
神奇的时间冻结手套
才知道Color OS14的控制中心可以直接拉出二级界面的
PID控制、模糊控制、模糊PID控制三种控制方式simulink仿真对比
2024 年解锁你的第一台天文望远镜丨第一台天文望远镜怎么选?新手、小白入门终极版
谐波赤道仪开始进入制作阶段,悲剧发生了
哈尔滨工业大学控制方向考研《801》,降维打击or劝退,一个上岸up的聊天!不算经验分享,内容很长,就是来聊聊稳我的感觉
全球最大相机LSST:32亿像素,造价1.6亿美刀,10年造1台!
卡塞格林次镜磨制,天文望远镜镜片磨制检测抛光学习。
【谐波赤道仪】开箱实测:晴空ST17 谐波赤道仪
赤道仪白天对极轴(阴天对极轴)
大家对古代机关感兴趣吗
天文望远镜实拍土星
制作了一个,不使用任何电池高亮手电筒
禧玛诺真的牛!耐摔程度和控制距离都很强!
缅因猫突然不受控制咬主人!!有没有人知道原因!!
完全控制小姐姐·真实催眠日记·51特别节目 · 第2期
一套键鼠如何控制两台电脑?
真的有人能拒绝一个末地传送门吗?
魔方小然小朋星野赤道仪-双轴重锤云台使用讲解
我的流麻也长翅膀了
10元语音识别模块,怎么实现语音控制开关
用鲜花簪学士帽,是一种什么体验
2024年5月深空摄影目标推荐
为什么别人不去月球背面,是不想去吗?
天文望远镜目视效果怎么样?要不要入手天文望远镜?
保姆级科普 自制牛顿式反射天文望远镜的结构+原理+部件作用